Aujourd’hui, nous testons un capteur de son binaire économique acheté sur Aliexpress. Pour 60 centimes, on nous propose un capteur capable de détecter un niveau sonore. Qu’en est il? c’est ce que nous verrons dans ce nouvel article de la rubrique alitest.
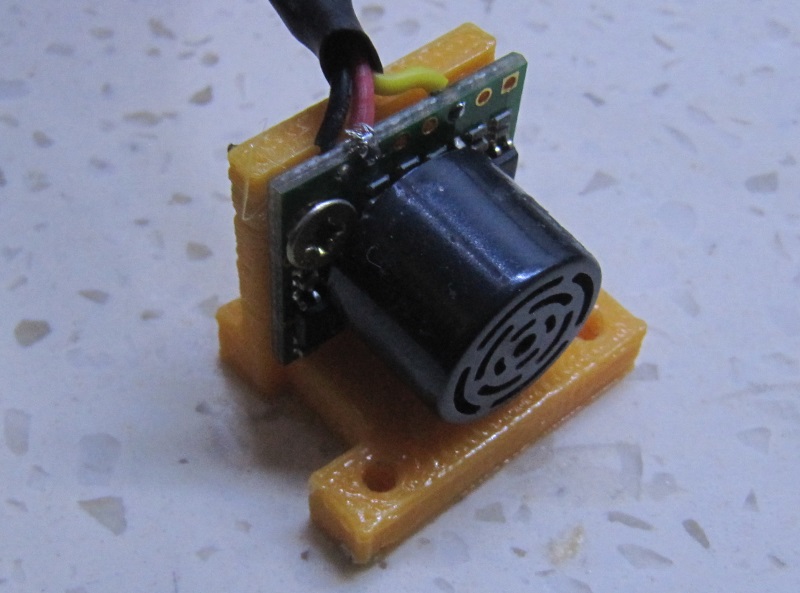
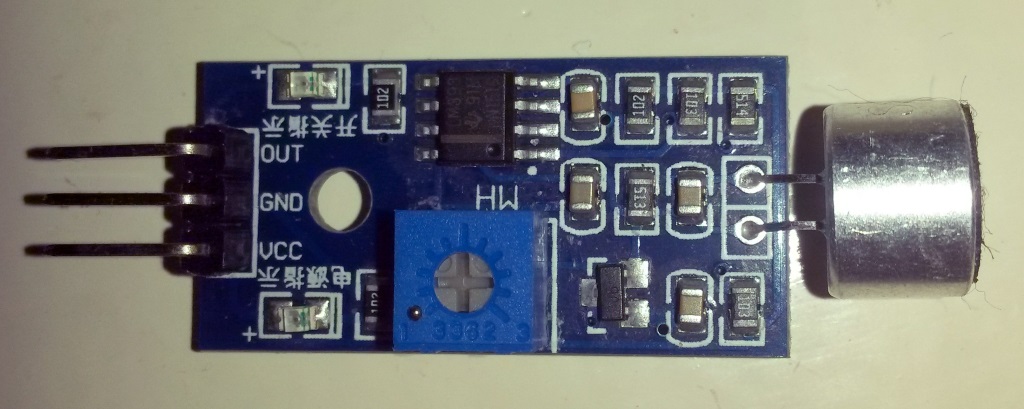
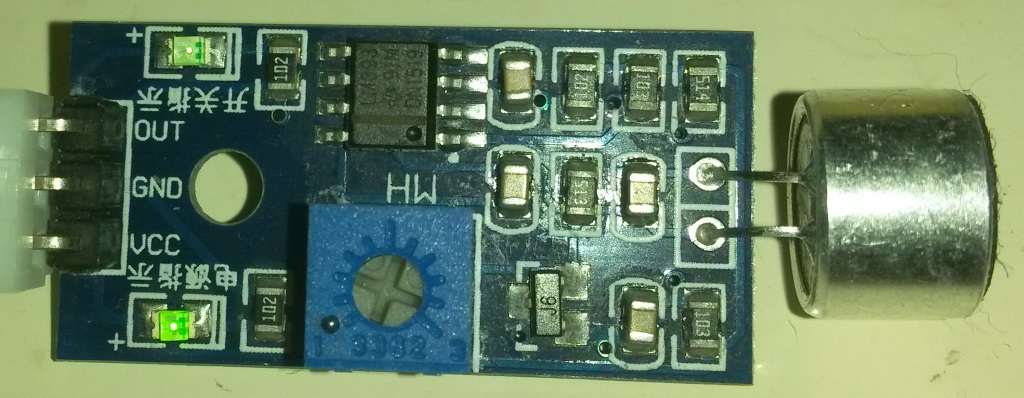
Tout d’abord le capteur en lui même est compact : 46*15.5*9.7mm dans les plus grandes dimensions. Il est fourni assemblé, avec un connecteur à trois broches (vout, gnd et vcc).


L’ensemble est assez simple, et il y a un trou pour fixer le capteur. Sur le côté droit sur les photos ci dessus se trouve le microphone chargé de capturer le son. Il n’est pas collé au circuit, donc on a un peu de latitude pour l’orienter, et on peut faire en sorte qu’il soit comme sur la photo, ou tourné vers l’arrière ou l’avant.
Branchement et installation
Le branchement est très simple : connectez la broche VCC au +5V sur un Arduino ou au +3.3V sur un Raspberrypi, GND à la masse, et OUT sur une entrée numérique (ou analogique), et le tour est joué. Si le branchement est correct, une DEL verte devrait s’allumer sur la carte. Sans rien programmer, une seconde DEL devrait s’allumer lorsque l’on fait assez de bruit. Le rail d’alimentation VCC requiert une tension entre 3.3 et 5V, donc toute valeur intermédiaire fera l’affaire.
Capteur de son binaire, à un moment ou il n’y a pas de son.
Utilisation du capteur de son binaire
L’utilisation est également très simple, puisqu’il s’agit d’un capteur de son binaire, c’est à dire dont la sortie est 0 ou 1. En pratique, il ne retournera pas le niveau sonore, mais simplement indiquera si l’on dépasse un certain seuil sonore.
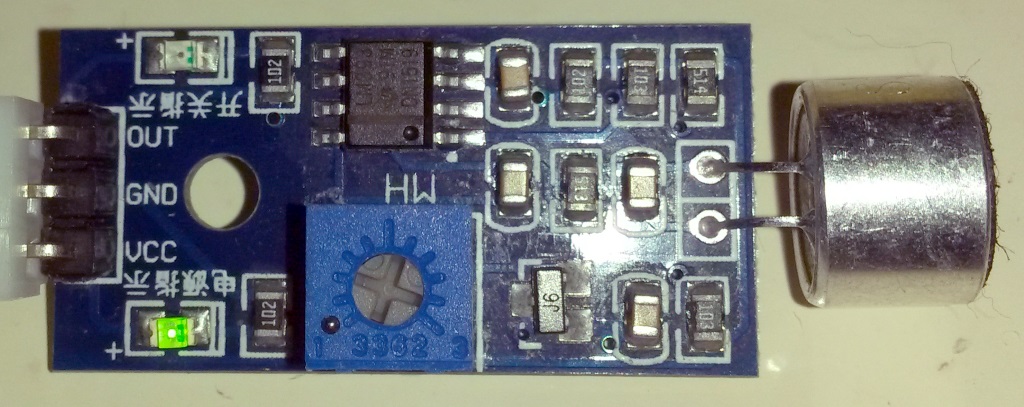
Capteur de son binaire, lorsqu’un son est détecté.
Le cas échéant, ce sera indiqué sur la carte par l’allumage d’une petite DEL, comme sur la photo ci dessus. Pour s’en servir, il suffira donc de lire la valeur du GPIO connecté à la broche OUT du capteur. Quand aucun son n’est détecté, la sortie est à 1, alors que lorsqu’un son est détecté la sortie sera à 0, comme illustré sur les deux images ci après. Il faudra donc bien faire attention dans le code, car c’est le contraire de ce à quoi on pourrait s’attendre.

Capteur de son à sortie binaire, à un moment ou il n’y a pas de son, la sortie est 1.
Le potentiomètre bleu visible sur les photos permet de régler le niveau du seuil de détection du son. Il nécessite un petit tournevis pour pouvoir l’ajuster, et ne sera donc pas modifié par erreur.
Utilisation avancée
Puisqu’il s’agit d’un capteur de son binaire, on ne peut pas directement mesurer le niveau sonore. Il est toutefois possible d’obtenir une indication approximative de celui ci. Pour cela, on fera de multiples mesures pendant une période définie, et on comptera le nombre de fois ou la sortie aura été à 0 (son détecté). Ainsi, la sommation de ces valeurs permettra d’obtenir une indication grossière du niveau sonore sur la période observée. Dans ce contexte, un bon réglage du seuil sera important.
Bien sur, pour obtenir une indication plus précise du niveau sonore, il est préférable d’utiliser des capteurs de son fournissant une sortie continue, comme les modèles suivants:
- carte avec micro electret et ampli MAX4466, sur Adafruit ou encore chez snootlab (nous reviendrons sur cette carte dans un billet ultérieur);
- carte avec micro electret et ampli MAX9814 chez Adafruit (un peu plus sophistiquée);
- carte avec microphone MEMS SPW2430, chez Adafruit, moins chère et plus basique.
Conclusions
Est-ce que cette carte fonctionne? Oui, elle fait le boulot. La sortie ne m’a pas paru extrêmement stable (elle ne reste pas toujours à 0,même quand il y a du bruit), donc je pense qu’il y a quelques ajustements à faire dans le code. La sortie du capteur est binaire, ce qui fait qu’il est moins sophistiqué que les autres capteurs mentionnés, mais à un prix aussi bas, je suppose qu’on ne peut pas en demander beaucoup plus!
En pratique, c’est un capteur qui fonctionne, et facilement. Je vous ferai des retours plus tard, en comparant ce que fournit ce capteur et celui d’Adafruit.