Le twinstar, c’est LE truc à la mode ces temps ci. Dans mon club aquariophile (Kazanac), certains en ont, et tout le monde à envie de tester. En tous cas, on en parle, notamment sur l’excellent blog Hackquarium.
Pour une explication détaillée, suivez le lien juste au dessus. Mais en gros, c’est un bidule que vous mettez dans votre aquarium, branchez à un boitier, et qui fait de minuscules bulles. Et par ce biais, on est censés réduire drastiquement la prolifération de certaines algues. Dans ma cuve contrôlée par un système automatisé programmable Rlieh, je n’en ai pas besoin car je n’ai pas d’algues. Par contre je suis curieux, et j’ai bien un petit bac en train de démarrer qui commence à avoir des algues… Seul hic, le twinstar coûte assez cher (150-200€).
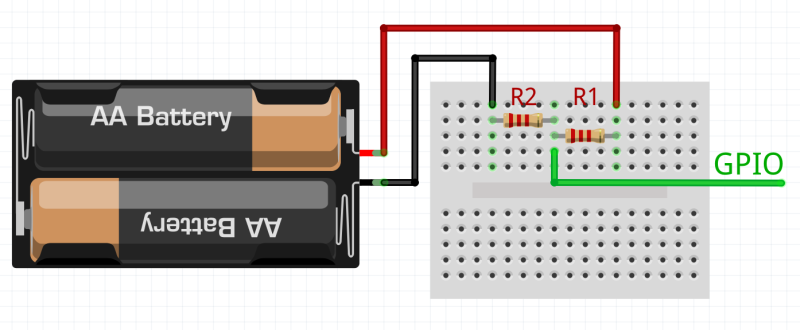
Du coup, de nombreuses initiatives apparaissent ici et là pour faire des Twinstar DIY, ou au moins des systèmes comparables. Je vous propose dans cet article de nous pencher sur la question.



 ).
).