Dans cet article, nous décrirons la conception du châssis de R.Hasika, un robot pensé pour être robuste, précis et autonome, présenté dans ce précédent billet, et dont voici la page de projet. Le châssis du robot est un élément important, puisqu’il lui conférera sa solidité, mais aussi une partie de ses capacités finales. En pratique, un bon châssis permettra un robot précis, du fait du positionnement exact des composants. Le châssis de R.Hasika présenté dans ce billet est un châssis monocoque, en une seule pièce, fait pour être construit à l’imprimante 3D. Détaillons maintenant sa conception et les fonctionnalités qu’il apporte.
Objectifs de conception du châssis de R.Hasika
le châssis de R.Hasika dans Openscad
Sur R.Cerda, le robot qui a précédé R.Hasika, le châssis était une simple planche de bois, sur laquelle venaient se fixer les divers éléments. Il en a résulté un assemblage peu précis, et des ajustements très “bricolés” de certains éléments, sans compter un robot assez gros pour ce qu’il permettait de faire. Cette fois ci, pour le châssis de R.Hasika, j’ai souhaité passer davantage de temps à la phase conception pour produire un châssis répondant à toutes les problématiques rencontrées pendant l’assemblage du robot :
- la simplicité de fabrication du châssis;
- la facilité d’assemblage du robot;
- la précision de l’assemblage;
- la solidité du robot assemblé;
- l’équilibrage du robot.
En plus de ces points s’ajoutent quelques avantages apportés par ce châssis, tels que la capacité de franchissement ou une certaine résistance à l’eau.
Voyons maintenant la conception de ce châssis, et tout au long de cet article nous verrons les concepts mis en oeuvre pour remplir les objectifs décrits plus haut.
Conception paramétrique dans OpenScad
Tout comme pour R.Ian, un autre robot fabriqué à l’imprimante 3D, le châssis de R.Hasika a été conçu de façon paramétrique avec Openscad. La conception paramétrique signifie en pratique que l’on peut modifier facilement certains éléments du robot en changeant quelques variables dans le script décrivant le châssis. Un outil de visualisation permet de vérifier le résultat, et on peut alors facilement imprimer sa version modifiée du châssis! Voici un exemple de ce que permet cette conception paramétrique :
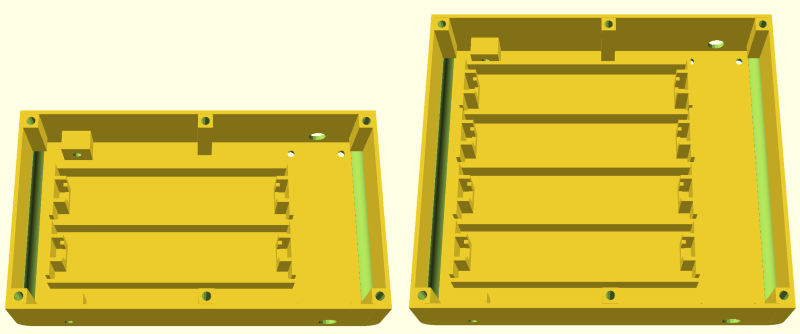
Châssis de R.Hasika dans OpenScad avec 2 et 4 emplacements de batteries, grâce à la conception paramétrique.
Sur cet exemple, en modifiant une variable, on peut facilement passer de 2 emplacements de batteries à 4, en élargissant le châssis de façon adéquate. On pourra ajuster de très nombreux autres paramètres, ce qui fera probablement l’objet d’un billet séparé, détaillant ce qui peut être modifié, et comment le faire.
Quoi qu’il en soit, pour la fabrication, c’est simple, puisqu’il suffit de télécharger le fichier stl du châssis, et de le fabriquer à l’imprimante 3D avec un matériau solide, tel que le PLA, l’ABS, ou encore certains nylons. Puisque la fabrication est faite par une machine, on aura des côtes précises, des trous bien positionnés, etc… Cela remplit donc notre objectif de précision par la même occasion.
De même, puisque le châssis est fait d’un seul tenant, il n’y a pas d’assemblage à faire pour les pièces structurelles, et donc on a une bonne solidité et une importante rigidité de l’ensemble, ce qui permet d’atteindre notre objectif de solidité.
Pour l’instant, revenons aux fonctionnalités du châssis en lui même.
Un châssis monocoque, avec des fixations pour tous les éléments nécessaires
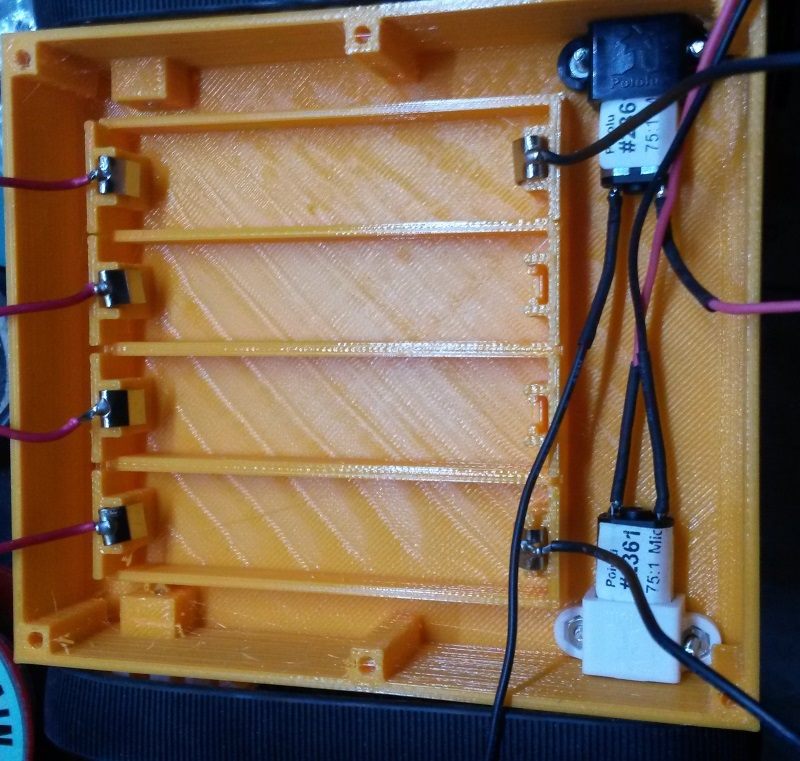
Châssis de R.Hasika quasi vide
Sur la photo ci contre, on peut voir le châssis de R.Hasika imprimé en PLA orange, quasiment vide. On note ici qu’il est fait d’une seule pièce, et que tous les éléments nécessaires au robot ont un emplacement précis. Ainsi, on note quatre compartiments rectangulaires : il s’agit des emplacements pour les batteries lithium 18650B qui alimentent le robot. Nous reviendrons sur l’alimentation électrique de R.Hasika dans un autre billet.
Quoi qu’il en soit, les batteries sont aussi basses que possibles, au niveau du plancher du robot, de façon à abaisser le centre de gravité. De même, elles sont centrées, ce qui fait que la masse la plus importante contenue dans le robot est équilibrée selon l’axe avant-arrière.
Dans ces emplacements de batteries viennent se placer des petits contacts pour batteries, avec leurs câbles.
On peut voir sur la droite les moteurs du robot, qui se placent également sur le fond du châssis, ce qui permet d’avoir la plus grande hauteur de franchissement possible, tout en protégeant ceux ci du milieu extérieur. Deux vis viennent fixer le tout par le dessous du châssis, et l’axe moteur sort par le côté par un trou prévu à cet effet.
Du côté gauche, on notera la présence de deux cubes, contre les parois : ce sont les blocs de fixation des roues libres du robot. Il s’agit donc simplement d’un bloc plein, avec un trou au milieu ou vient se fixer l’axe de la roue. Dans tous les cas, les roues libres et les roues motorisées ont été positionnées précisément à ces endroits de façon à fournir une bonne tension pour la chenille, et sont juste à la bonne distance pour que la chenille dépasse légèrement du robot à l’avant et à l’arrière. Ainsi, si un obstacle est présent devant le robot, les chenilles pourront accrocher cet obstacle et le robot pourra monter dessus, même s’il s’agit d’un obstacle en angle droit.
On constate enfin contre les parois 6 piliers avec un trou au milieu : ils permettent de fixer la plaque de support de l’électronique, qui vient donc se visser par dessus le châssis, une fois les éléments en place. Cela permet de remplir le second objectif : le robot est simple à assembler, puisque les éléments ont une place, et une seule. On ne peut pas réellement se tromper, et il suffit de mettre les éléments à leur place, puis de visser quelques vis (une douzaine à ce niveau).
Voici une photo du robot vu de dessus, une fois que l’on a installé les batteries, les moteurs, et les roues libres :
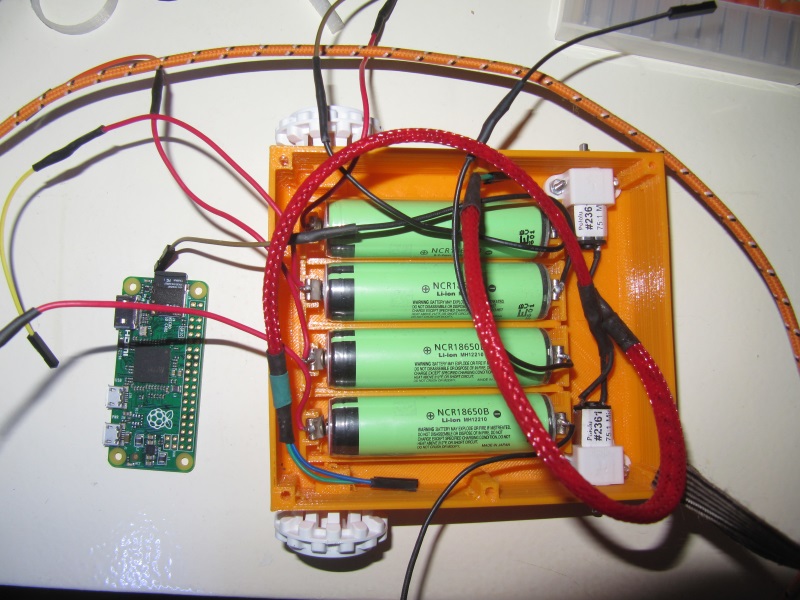
Les batteries lithium de R.Hasika en place
Franchissement d’obstacles et protection contre l’environnement
Le châssis, comme nous l’avons vu plus haut, à un impact sur la capacité de franchissement d’obstacles. Ainsi, les roues qui dépassent légèrement permettent d’agripper les objets à franchir. Mais en outre, la hauteur de franchissement à été optimisée au maximum, comme on peut le voir ci dessous :

R.Hasika, en vue de profil, sans la carrosserie.
On a donc la plus grande hauteur sous châssis possible pour cette taille de roue, tout en maintenant une bonne protection des éléments internes. Pour augmenter davantage cette hauteur, il aurait fallu fixer les moteurs sous le châssis, à l’extérieur, avec les risques que cela comporte. En effet, cela aurait causé des protubérances sous le robot, qui auraient pu accrocher des obstacles, sans même parler du fait que ceux ci risqueraient de s’abîmer.
Sur la photo ci dessous, nous pouvons analyser une vue de dessous de R.Hasika :

R.Hasika en vue de dessous.
On peut constater que le dessous du robot est lisse, hormis les 4 vis de fixation des moteurs. Il n’y a donc rien pour accrocher un obstacle, et de même, les composants internes sont protégés. En effet, une éclaboussure d’eau ne pourrait pénétrer par le dessous du robot.
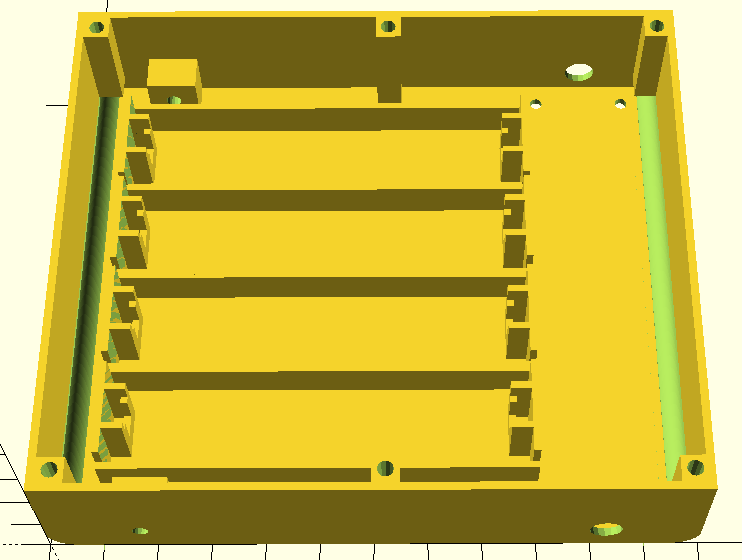
Cette volonté de n’opposer aucune résistance aux obstacles a été poussée également à la forme même du châssis, dont l’avant et l’arrière sont arrondis pour limiter les points d’accroche, comme on peut le voir sur le rendu 3D ci dessous :
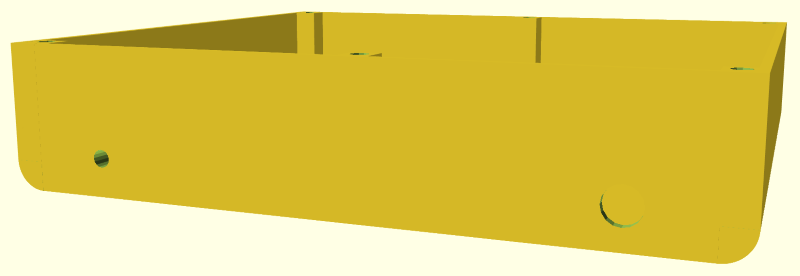
Vue 3/4 latérale du châssis de R.Hasika. On note les bords avant et arrière arrondis.
On voit également le trou pour l’axe moteur, et celui pour les roues libres. La photo suivante permet de voir cette courbure, mais également le léger dépassement des roues à l’avant :

Coin avant arrondi de R.Hasika, et dépassement léger de la roue à l’avant.
Dans le prochain billet, nous nous pencherons sur l’alimentation électrique de R.Hasika, pensée pour permettre une forte autonomie et une recharge autonome par le robot lui même.
Salut , comment as tu obtenue ta chenille ? tu l’a achetée ou imprimée?
Merci pour ton article!