
Fabriquer un boîtier n’est pas très compliqué. Il faut juste un plan, des matériaux, et quelques outils. Pour ma part, j’ai décidé d’utiliser du bois, plus précisément du contreplaqué. Ce choix peut paraître surprenant car ce matériau est plus connu comme isolant thermique. Toutefois, il est facile à travailler, peu cher, résistant et peut avoir un bel aspect. De plus, faire son boîtier soi même permet de penser l’aération. Je ne crains donc pas les surchauffes, puisque les composants seront abondamment ventilés. Je vais vous présenter ici la première version de mon boîtier NAS, déjà finie au moment de l’écriture de ce billet.
En savoir plus
You are browsing archives for
Mois : janvier 2013
Mesurer la luminosité avec une photo résistance
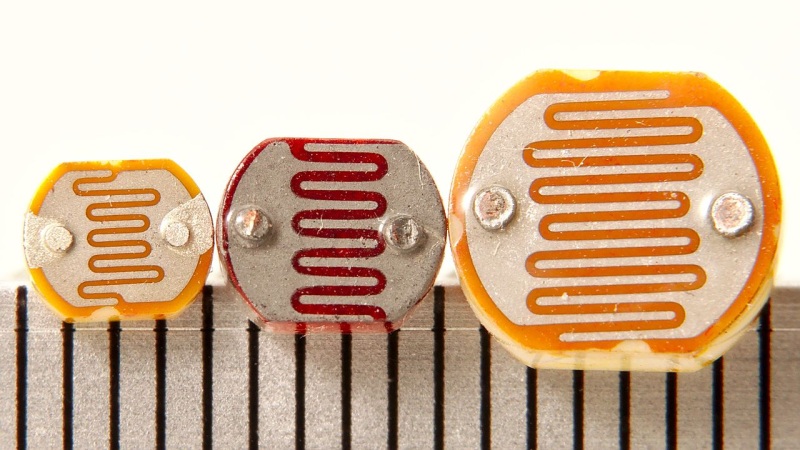

Photo résistance
Une photo-résistance est un composant dont la résistance varie en fonction de l’intensité lumineuse s’appliquant sur sa surface. On peut s’en servir pour détecter s’il fait jour ou nuit, mais aussi, en utilisant une paire de photo résistances, déterminer la direction d’une source lumineuse. Ce composant pourra par exemple servir à orienter un panneau solaire vers le soleil et ainsi maximiser l’énergie reçue… On pourra également s’en servir pour un robot suiveur de ligne, ou pour détecter le mouvement d’un objet qui obstruerait une source lumineuse. Les applications sont très nombreuses, et ce composant est économique et simple à utiliser, alors pourquoi s’en priver?
Ce billet vise à décrire la lecture des valeurs d’une photodiode en utilisant un Raspberry Pi. Nous avons vu comment lire des valeurs analogiques en utilisant une puce MCP3008, et nous utiliserons ce même montage pour lire notre photo résistance. Si vous utilisez un Arduino, c’est encore plus simple, puisqu’il suffira de connecter la broche de lecture à une broche analogique du Arduino, et de remplacer l’alimentation 3.3V par une alimentation 5V sur le schéma.
De nombreux tutoriels sont disponibles pour Arduino, par exemple celui d’Adafruit : Utiliser une photorésistance avec un Arduino.
Voyons maintenant de quoi nous aurons besoin.
- Une photorésistance
- Une résistance classique d’environ 1-2KOhm (valeur à adapter à ce que vous voulez mesurer)
- Un Raspberry Pi
- Un MCP3008 connecté au Raspberry pi
- Comme d’habitude, c’est plus facile avec une breadboard, mais on peut faire sans.
Lire des entrées analogiques sur un Raspberry avec un circuit ADC : le MCP3008
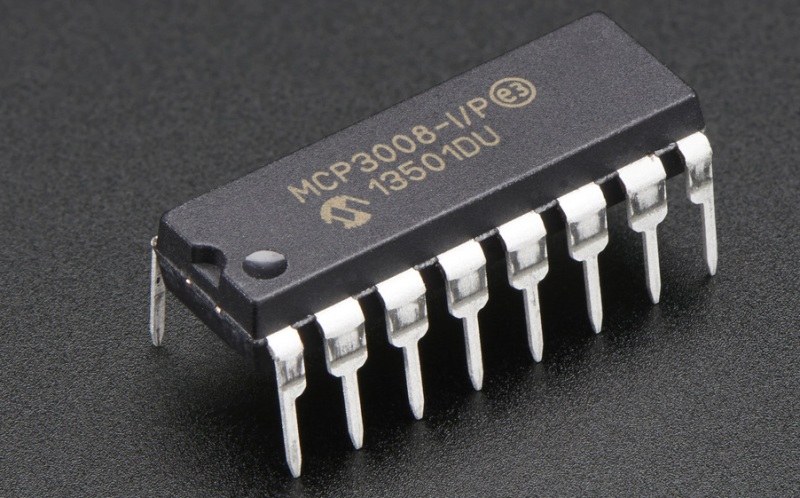
Convertisseur analogique-numérique MCP3008
Le Raspberry pi est doté des GPIO, capables de servir d’entrées(tuto) ou de sorties(tuto) numériques. On peut donc lire des signaux logiques hauts ou bas (des 0 ou des 1). Il n’est en revanche pas possible de lire directement des valeurs analogiques. Pour cela, il faut utiliser un ADC, pour “Analog to Digital Converter”, ou convertisseur analogique vers numérique en français, dont le Raspberry Pi n’est pas doté. L’objet de ce tutoriel sera justement de connecter une puce, la MCP3008, au Raspberry pi via le bus SPI pour ajouter huit entrées analogiques. A titre d’exemple, nous nous servirons de ces entrées pour pouvoir effectuer la lecture des valeurs d’un capteur simple : le potentiomètre. Il est toujours possible d’accéder à la liste des tutoriels sur le Raspberry pi sur le wiki.
N’hésitez pas à consulter la version wiki de cet article, plus confortable avec des liens supplémentaires.
Utilisation d’un circuit L293D pour commander des moteurs
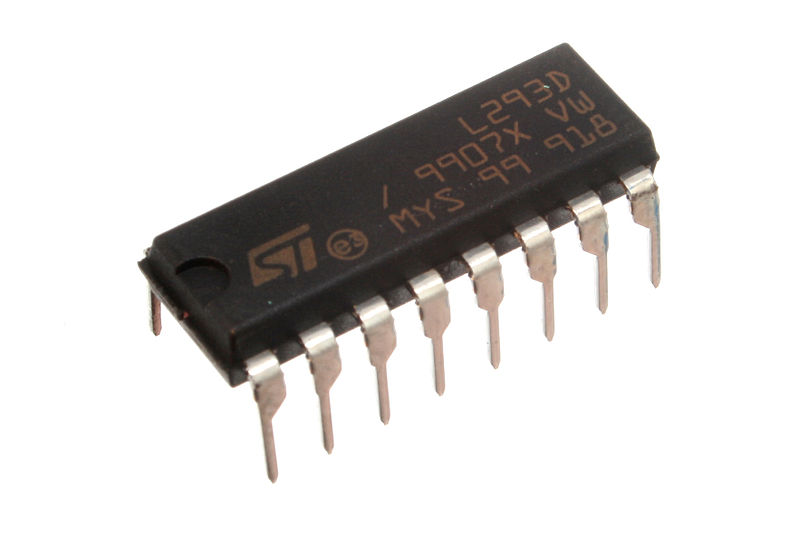

L293D Motor Driver
Si l’on branche un moteur à courant continu (DC Motor) à une source de courant adaptée, celui ci tournera. Si l’on veut inverser le sens de rotation, il suffit d’inverser le branchement. Cependant, inverser des branchements “à la main” ne convient pas à un robot. Nous verrons donc aujourd’hui comment contrôler le sens et la vitesse de rotation d’un ou deux moteurs en utilisant un circuit intégré L293D. Pour davantage de moteurs, il suffira de multiplier les puces L293D. Cette puce vaut environ 2.5$. Dans ce tutoriel, nous verrons comment interfacer cette puce avec un raspberry pi (les branchements). Ce tutoriel est également valable pour un Arduino ou tout autre microcontrôleur ayant des sorties programmables En savoir plus
Test Rapide : Hub USB Trust 7 ports

Pour moins de 20€, Trust nous propose un hub USB 7 ports, alors qu’a ce prix on trouve généralement des hubs 4 ports. Trust est une marque généralement connue pour ses produits d’entrée de gamme peu chers, mais pas toujours de la meilleure qualité.
Voyons comment se débrouille notre produit.
Lire la valeur d’un bouton connecté aux GPIO du Raspberry Pi

Les GPIO du Raspberry pi peuvent être utilisés en sortie (écriture), mais également en entrée (lecture). Nous nous intéresserons ici à cette seconde possibilité, qui permettra au Raspberry pi de recevoir des informations du monde extérieur. L’objectif de ce tutoriel est de s’appuyer sur le tutoriel sur l’utilisation d’un GPIO en sortie pour contrôler une LED, et d’y ajouter le fait de lire un bouton poussoir connecté sur un autre GPIO pour changer l’état de cette LED. Il est également possible d’accéder à la liste des tutoriels sur le Raspberry pi pour voir d’autres utilisations.
Contrôler une LED depuis les GPIO du Raspberry PI

Un des grands intérêts du Raspberry pi est qu’il dispose de GPIO utilisables comme entrée ou sortie afin de lire des capteurs ou commandes des systèmes. Nous nous verrons ici comment contrôler les GPIO du Raspberry pi configurés en mode sorte, à travers un exemple concret ou nous commanderons une LED. Il est également possible d’accéder à la liste des tutoriels sur le Raspberry pi pour voir d’autres utilisations.
Les moteurs électriques ou comment faire bouger les choses
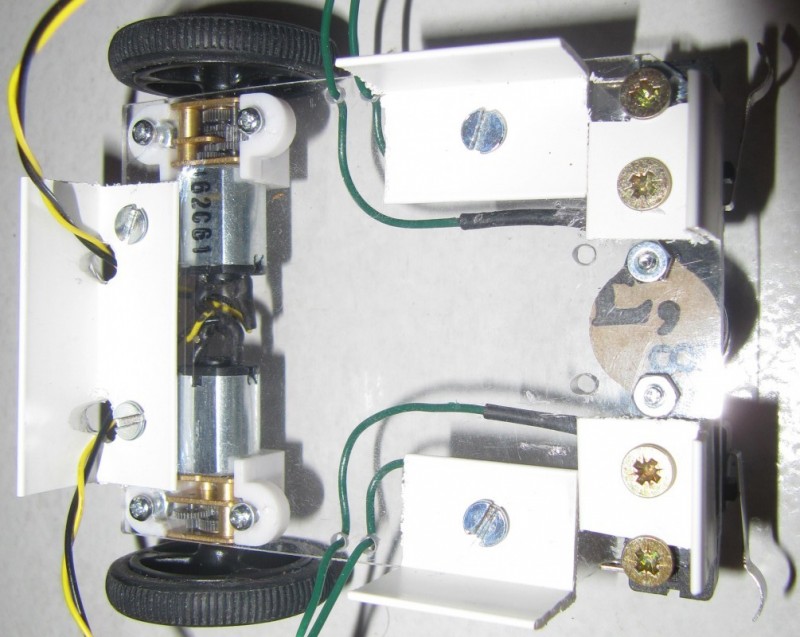
Nous allons voir ici différents types de moteurs, tous électriques, que nous pourrons utiliser dans des projets robotiques, domotiques ou autres. Nous nous concentrerons uniquement sur des dispositifs électriques, car ceux ci peuvent être contrôlés par un processeur que nous pourrons programmer facilement, et peuvent fonctionner avec des piles, batteries, panneaux solaires… Quoi de mieux pour faire un robot?
Nous verrons quatre types principaux de moteurs :
D’autres types de moteurs électriques existent, mais ceux ci sont les plus courant et nous seront les plus utiles.
- Les moteurs à courant continu, ou DC motors;
- Les moteurs “pas à pas”, ou Stepper motors;
- Les moteurs linéaires ou Linear motors;
- et enfin les servo moteurs.