Pour notre programme REA, nous développons un Rover d’Exploration Autonome. A la précédente étude, nous avons étudié les modes de déplacement accessibles, avant d’opter pour un système basé sur des roues/chenilles, avec un système de conduite différentielle.
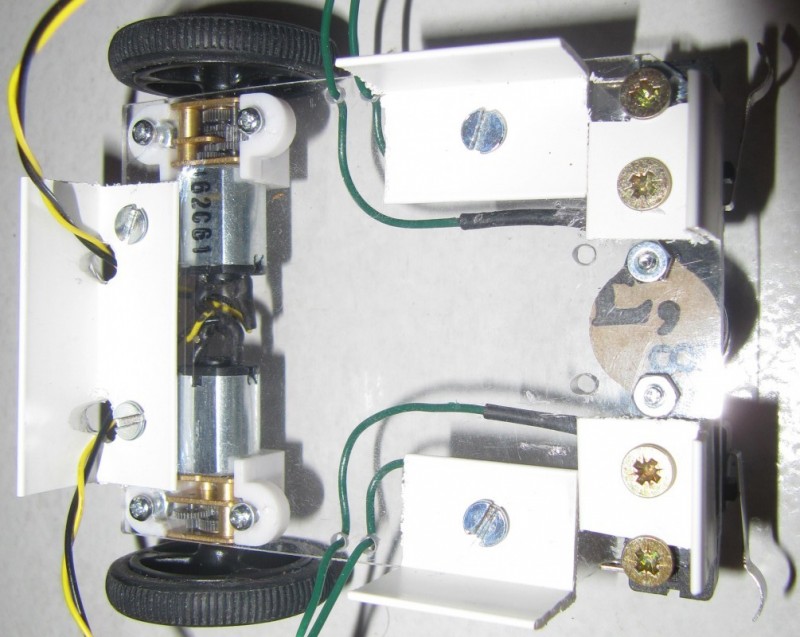
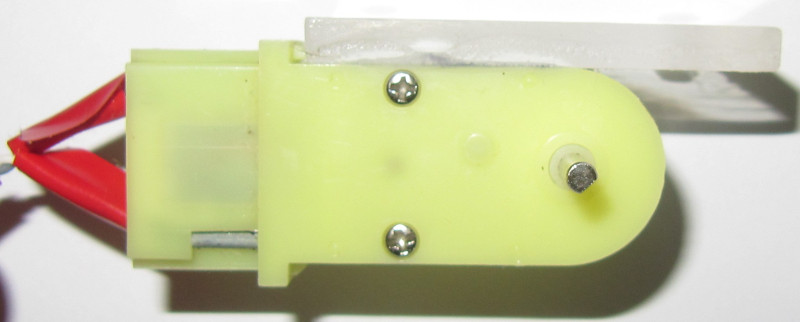
L’objectif sera d’utiliser une source d’énergie quelconque pour générer un mouvement de rotation pour entraîner les roues. Puisque nous avons choisi la conduite différentielle, il nous faudra deux moteurs (ou N paires).
Étudions maintenant les solutions de motorisation qui nous sont accessibles.