A quel point un robot peut il être simple à concevoir? Il y a un moment (en 2013), je me suis demandé à quoi ressemblerait le robot le plus simple que je pourrais fabriquer. Je vous propose de découvrir dans ce billet le résultat.
You are browsing archives for
Catégorie : robotique
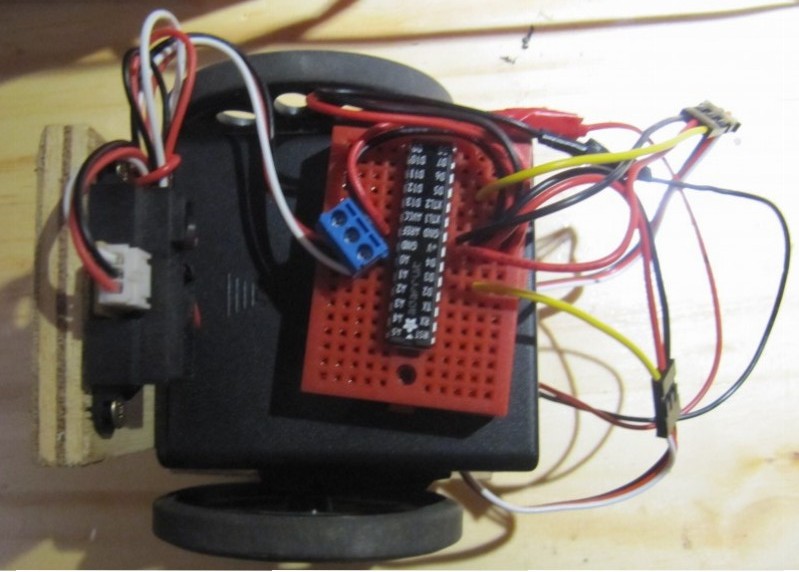
R.Eikki : Construction du mini robot basse consommation
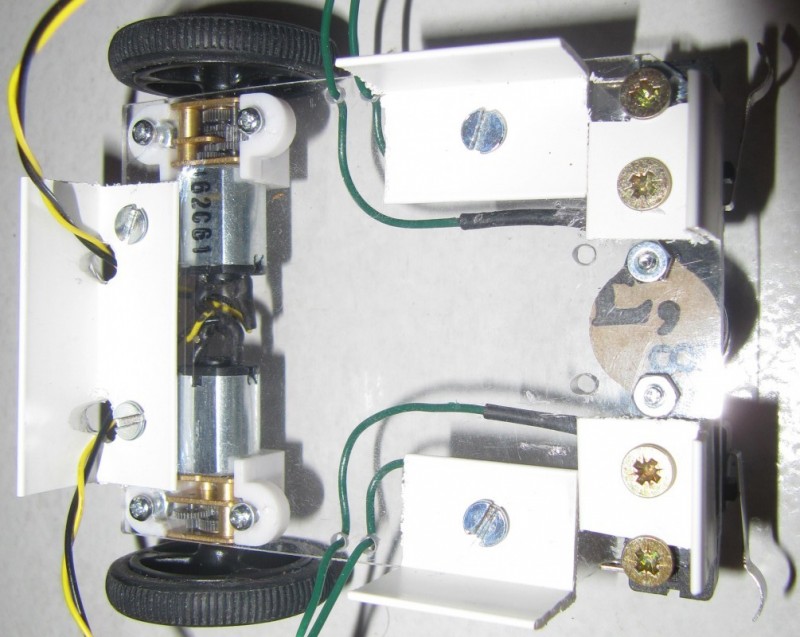
R.Eikki est un robot pensé pour être économe en énergie et donc avoir une grande autonomie.
Les robots peuvent être plus ou moins gros, complexes, voir puissants. Mais pour ce projet, nous nous intéressons à l’autonomie. L’objectif du prototype R.Eikki est de concevoir un robot ayant la plus grande autonomie possible, tout en restant compact. On ne cherchera donc pas à mettre des tonnes de batteries, mais plutôt pour un matériel donné, à optimiser la consommation au maximum pour en tirer la plus longue durée de fonctionnement possible sur une charge de batterie.
j’ai discuté ce sujet en profondeur sur le forum robot-maker. Cliquez ci dessous pour voir la galerie sur ce robot.
Liste de tutoriels Raspberry pi sur le wiki
J’ai commencé à porter les tutoriels Raspberry Pi sur le wiki. Je remets donc en forme, corrige, actualise et améliore les anciens tutoriels, tout en ajoutant de nouvelles ressources. Si vous êtes donc intéressés par le Raspberry Pi, et vous demandez comment réaliser une chose en particulier, n’hésitez pas à vous rendre dans la section Raspberry pi du wiki (http://nagashur.com/wiki/doku.php?id=raspberry_pi:start).
Pour l’instant voici la liste de tutoriels Raspberry pi postés :
- Contrôler des GPIO en sortie;
- Contrôler des GPIO en entrée (lecture);
- Gérer une LED RGB via les GPIO du Raspberry Pi;
- Ajouter des entrées analogiques au Raspberry Pi via un MCP3008, et lire la valeur d’un potentiomètre;
- Ajouter des GPIO supplémentaires au Raspberry Pi via une puce MCP23008 ou MCP23017;
- Mesurer la luminosité ambiante via une photorésistance en utilisant le MCP3008;
- Mesurer la température via la sonde analogique TMP36 et un MCP3008;
- Ajouter un écran texte au Raspberry Pi via un MCP23017/MCP23008;
- Créer un service UNIX sur le Raspberry pi.
Au passage, dans la section Robotique du Wiki, j’ai porté les tutoriels sur la création d’un robot basé sur le Raspberry Pi, R.Cerda.
Un nouveau robot basé sur le Raspberry Pi : R.Hasika
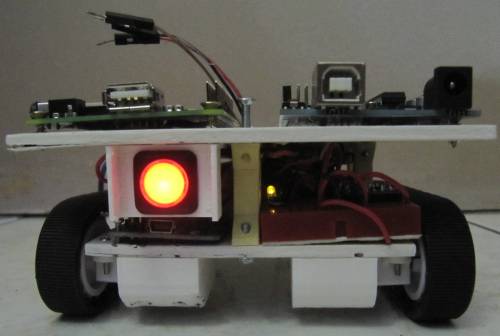
J’ai commencé la construction d’un nouveau robot basé sur le Raspberry pi, R.Hasika.
Celui ci reprend les bases du précédent, R.Cerda, mais en améliorant l’ensemble avec une conception plus précise. L’objectif de ce robot est de pouvoir obtenir un déplacement rectiligne et précis, et des rotations exactes. Ainsi, il devrait être possible de mesurer le déplacement du robot, et de calculer sa position en fonction des déplacements effectués par rapport au point de départ.
L’un des objectifs est de pouvoir faire en sorte que R.Hasika soit capable de se déplacer dans un environnement pour accomplir une mission quelconque, puis de revenir à un point précis afin de pouvoir se recharger automatiquement.
La conception de ce robot est ouverte, je fournis donc les plans et fichiers permettant de reproduire exactement le même robot, ainsi que les scripts permettant d’en modifier certains paramètres (largeur, hauteur, etc).
Pour plus d’informations, les fichiers, des explications, les plans, scripts et codes sources, rendez vous sur la page centrale du projet R.Hasika (http://nagashur.com/wiki/doku.php?id=robotique:r_hasika:start).
Pour voir l’avancement du projet, rendez vous sur la page d’avancement de R.Hasika (http://nagashur.com/wiki/doku.php?id=robotique:r_hasika:avancement).
Mesurer la distance à laquelle se trouve un objet avec un capteur infrarouge sur le Raspberry Pi

Dans le ce billet, nous verrons comment utiliser un capteur de distance infrarouge ou pour mesurer précisément la distance entre le capteur et un objet en face de celui ci. Dans un prochain billet, nous verrons comment réaliser la même chose avec un capteur à ultra-sons.
Mesurer la luminosité avec une photo résistance
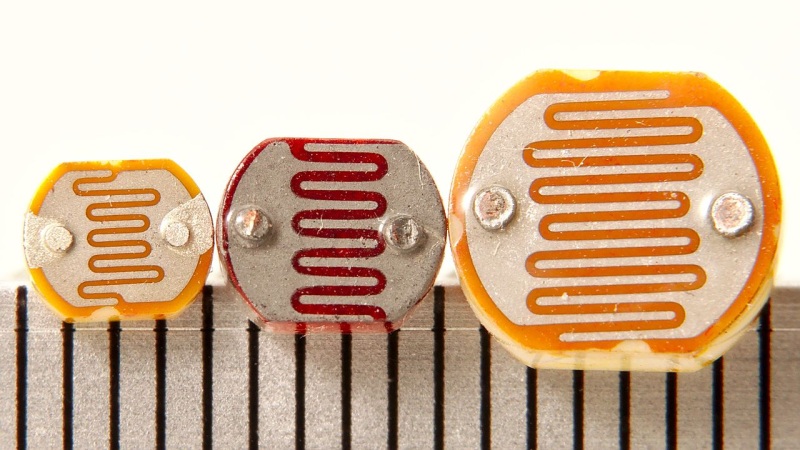

Photo résistance
Une photo-résistance est un composant dont la résistance varie en fonction de l’intensité lumineuse s’appliquant sur sa surface. On peut s’en servir pour détecter s’il fait jour ou nuit, mais aussi, en utilisant une paire de photo résistances, déterminer la direction d’une source lumineuse. Ce composant pourra par exemple servir à orienter un panneau solaire vers le soleil et ainsi maximiser l’énergie reçue… On pourra également s’en servir pour un robot suiveur de ligne, ou pour détecter le mouvement d’un objet qui obstruerait une source lumineuse. Les applications sont très nombreuses, et ce composant est économique et simple à utiliser, alors pourquoi s’en priver?
Ce billet vise à décrire la lecture des valeurs d’une photodiode en utilisant un Raspberry Pi. Nous avons vu comment lire des valeurs analogiques en utilisant une puce MCP3008, et nous utiliserons ce même montage pour lire notre photo résistance. Si vous utilisez un Arduino, c’est encore plus simple, puisqu’il suffira de connecter la broche de lecture à une broche analogique du Arduino, et de remplacer l’alimentation 3.3V par une alimentation 5V sur le schéma.
De nombreux tutoriels sont disponibles pour Arduino, par exemple celui d’Adafruit : Utiliser une photorésistance avec un Arduino.
Voyons maintenant de quoi nous aurons besoin.
- Une photorésistance
- Une résistance classique d’environ 1-2KOhm (valeur à adapter à ce que vous voulez mesurer)
- Un Raspberry Pi
- Un MCP3008 connecté au Raspberry pi
- Comme d’habitude, c’est plus facile avec une breadboard, mais on peut faire sans.
Lire des entrées analogiques sur un Raspberry avec un circuit ADC : le MCP3008
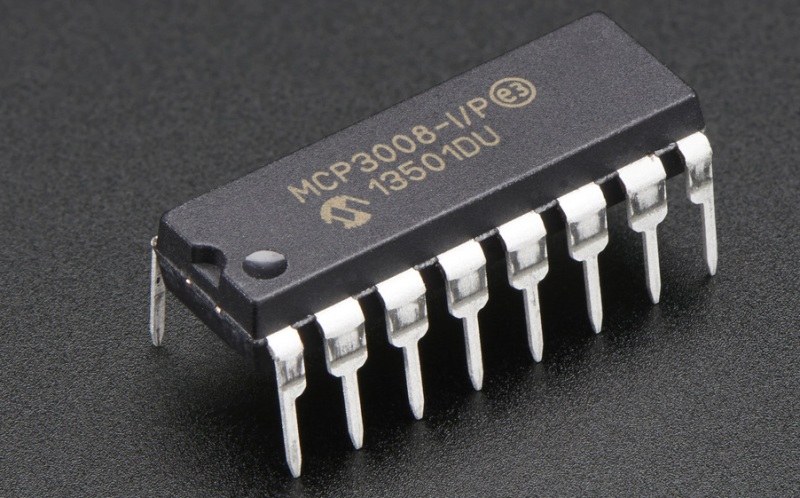
Convertisseur analogique-numérique MCP3008
Le Raspberry pi est doté des GPIO, capables de servir d’entrées(tuto) ou de sorties(tuto) numériques. On peut donc lire des signaux logiques hauts ou bas (des 0 ou des 1). Il n’est en revanche pas possible de lire directement des valeurs analogiques. Pour cela, il faut utiliser un ADC, pour “Analog to Digital Converter”, ou convertisseur analogique vers numérique en français, dont le Raspberry Pi n’est pas doté. L’objet de ce tutoriel sera justement de connecter une puce, la MCP3008, au Raspberry pi via le bus SPI pour ajouter huit entrées analogiques. A titre d’exemple, nous nous servirons de ces entrées pour pouvoir effectuer la lecture des valeurs d’un capteur simple : le potentiomètre. Il est toujours possible d’accéder à la liste des tutoriels sur le Raspberry pi sur le wiki.
N’hésitez pas à consulter la version wiki de cet article, plus confortable avec des liens supplémentaires.
Utilisation d’un circuit L293D pour commander des moteurs
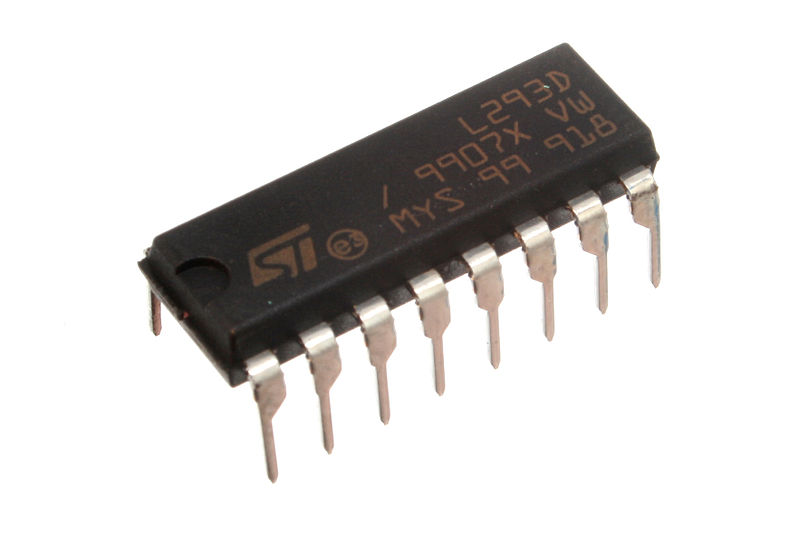

L293D Motor Driver
Si l’on branche un moteur à courant continu (DC Motor) à une source de courant adaptée, celui ci tournera. Si l’on veut inverser le sens de rotation, il suffit d’inverser le branchement. Cependant, inverser des branchements “à la main” ne convient pas à un robot. Nous verrons donc aujourd’hui comment contrôler le sens et la vitesse de rotation d’un ou deux moteurs en utilisant un circuit intégré L293D. Pour davantage de moteurs, il suffira de multiplier les puces L293D. Cette puce vaut environ 2.5$. Dans ce tutoriel, nous verrons comment interfacer cette puce avec un raspberry pi (les branchements). Ce tutoriel est également valable pour un Arduino ou tout autre microcontrôleur ayant des sorties programmables En savoir plus
Les moteurs électriques ou comment faire bouger les choses
Nous allons voir ici différents types de moteurs, tous électriques, que nous pourrons utiliser dans des projets robotiques, domotiques ou autres. Nous nous concentrerons uniquement sur des dispositifs électriques, car ceux ci peuvent être contrôlés par un processeur que nous pourrons programmer facilement, et peuvent fonctionner avec des piles, batteries, panneaux solaires… Quoi de mieux pour faire un robot?
Nous verrons quatre types principaux de moteurs :
D’autres types de moteurs électriques existent, mais ceux ci sont les plus courant et nous seront les plus utiles.
- Les moteurs à courant continu, ou DC motors;
- Les moteurs “pas à pas”, ou Stepper motors;
- Les moteurs linéaires ou Linear motors;
- et enfin les servo moteurs.
Le cycle des robots : les Robots de l’aube

Bonjour à tous! ce billet, dont le titre fait référence au cycle des robots, d’Isaac Asimov, me permet de vous indiquer une nouvelle thématique : la robotique. J’ai décidé depuis peu de me lancer dans la robotique, la domotique, et les systèmes automatiques/intelligents. Je me mettrai donc dorénavant à poster des billets sur ces thématiques, des tutoriels, des pages de liens…
L’objectif est de pouvoir aborder la robotique du point de vue d’un débutant, et de proposer des ressources qui permettent de s’y mettre, et de commencer à appréhender le domaine, et de réaliser soi même des montages ne nécessitant pas forcément de grands moyens.
En attendant mes billets, voici déjà quelques liens:
- Ma chaîne Youtube, qui comporte quelques vidéos explicatives
- Un groupe google sur le sujet auquel je participe avec des étudiants
- Adafruit, un très bon vendeur de composants avec de très nombreux et complets tutoriels
- Le site officiel de la plate forme Arduino, avec également de très bon tutoriels,
- Le site officiel de la plate forme Raspberry Pi, et ses très complets forums.
Je ferrai un annuaire plus détaillé ultérieurement, mais voici déjà de quoi se documenter si vous ne pouvez pas attendre mes prochains billets 😉