
Le BME280 est le successeur du BMP185 et du BMP85. Ce composant permet de mesurer la température, la pression atmosphérique et l’hygrométrie (taux d’humidité dans l’air). La communication avec ce composant passe par l’omniprésent et très pratique bus I2C. Nous verrons ici comment utiliser le BME280 sur Raspberry pi.
You are browsing archives for
Catégorie : composants
Nouveau tutoriel sur le wiki : le DS18B20 sur un Raspberry pi
L’un des tutoriels à été porté sur le wiki. Cette fois ci, il s’agit de la Mesure de la température avec une sonde numérique DS18B20 sur un RaspberryPi. Ce tutoriel avait été préalablement publié au format blog ici.
Cette version permet une bonne visualisation du code et le téléchargement aisé des fichiers sources décrits (plus de copier-coller qui fonctionnent mal 🙂 ), ainsi qu’une navigation simplifiée. On peut également exporter l’article vers divers formats.
Bonne lecture!
Les écrans LCD texte et leur conversion I2C

J’ai fait une nouvelle vidéo sur ma chaine youtube, sur les écrans LCD texte classiques, à base de HD44780 (ceux qu’on trouve partout), et sur leur conversion en écrans I2C en utilisant une carte additionnelle qui permet de passer de 6-8 GPIOs occupés à 2 (qui restent utilisables en plus!).
Plus d’explications dans la vidéo :
Capteur de son binaire (seuil) – Alitest
Aujourd’hui, nous testons un capteur de son binaire économique acheté sur Aliexpress. Pour 60 centimes, on nous propose un capteur capable de détecter un niveau sonore. Qu’en est il? c’est ce que nous verrons dans ce nouvel article de la rubrique alitest.
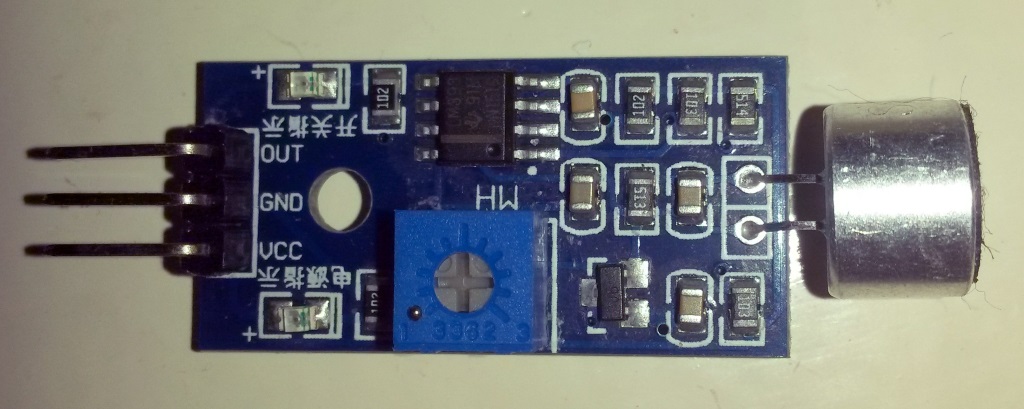
Tout d’abord le capteur en lui même est compact : 46*15.5*9.7mm dans les plus grandes dimensions. Il est fourni assemblé, avec un connecteur à trois broches (vout, gnd et vcc).

Capteur de son à sortie binaire

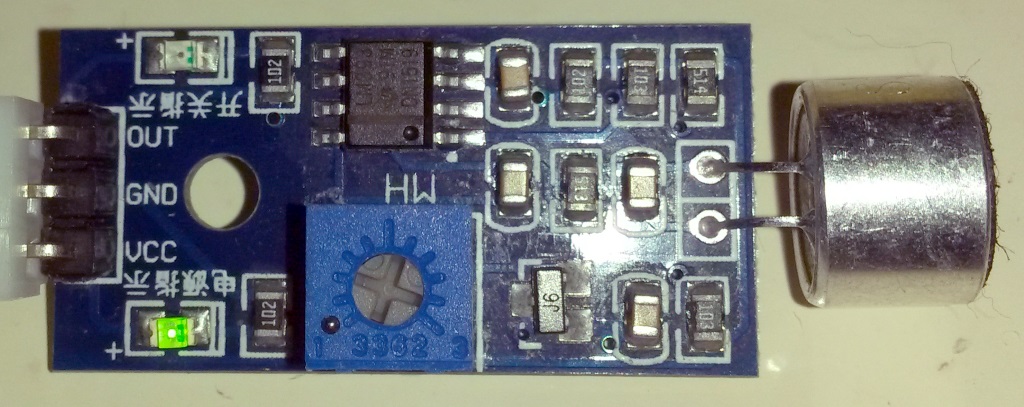
Capteur de son à sortie binaire, vue arrière du circuit.
L’ensemble est assez simple, et il y a un trou pour fixer le capteur. Sur le côté droit sur les photos ci dessus se trouve le microphone chargé de capturer le son. Il n’est pas collé au circuit, donc on a un peu de latitude pour l’orienter, et on peut faire en sorte qu’il soit comme sur la photo, ou tourné vers l’arrière ou l’avant.
Branchement et installation
Le branchement est très simple : connectez la broche VCC au +5V sur un Arduino ou au +3.3V sur un Raspberrypi, GND à la masse, et OUT sur une entrée numérique (ou analogique), et le tour est joué. Si le branchement est correct, une DEL verte devrait s’allumer sur la carte. Sans rien programmer, une seconde DEL devrait s’allumer lorsque l’on fait assez de bruit. Le rail d’alimentation VCC requiert une tension entre 3.3 et 5V, donc toute valeur intermédiaire fera l’affaire.
Capteur de son binaire, à un moment ou il n’y a pas de son.
Utilisation du capteur de son binaire
L’utilisation est également très simple, puisqu’il s’agit d’un capteur de son binaire, c’est à dire dont la sortie est 0 ou 1. En pratique, il ne retournera pas le niveau sonore, mais simplement indiquera si l’on dépasse un certain seuil sonore.
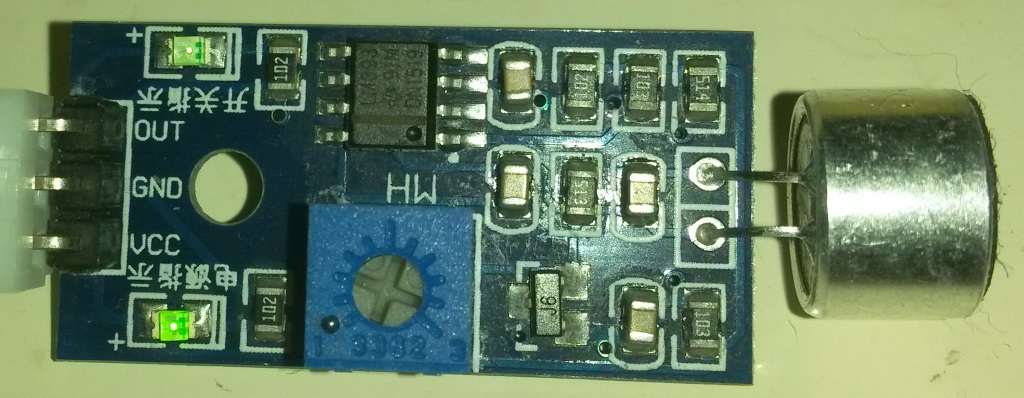
Capteur de son binaire, lorsqu’un son est détecté.
Le cas échéant, ce sera indiqué sur la carte par l’allumage d’une petite DEL, comme sur la photo ci dessus. Pour s’en servir, il suffira donc de lire la valeur du GPIO connecté à la broche OUT du capteur. Quand aucun son n’est détecté, la sortie est à 1, alors que lorsqu’un son est détecté la sortie sera à 0, comme illustré sur les deux images ci après. Il faudra donc bien faire attention dans le code, car c’est le contraire de ce à quoi on pourrait s’attendre.

Capteur de son à sortie binaire, à un moment ou il n’y a pas de son, la sortie est 1.
Le potentiomètre bleu visible sur les photos permet de régler le niveau du seuil de détection du son. Il nécessite un petit tournevis pour pouvoir l’ajuster, et ne sera donc pas modifié par erreur.
Utilisation avancée
Puisqu’il s’agit d’un capteur de son binaire, on ne peut pas directement mesurer le niveau sonore. Il est toutefois possible d’obtenir une indication approximative de celui ci. Pour cela, on fera de multiples mesures pendant une période définie, et on comptera le nombre de fois ou la sortie aura été à 0 (son détecté). Ainsi, la sommation de ces valeurs permettra d’obtenir une indication grossière du niveau sonore sur la période observée. Dans ce contexte, un bon réglage du seuil sera important.
Bien sur, pour obtenir une indication plus précise du niveau sonore, il est préférable d’utiliser des capteurs de son fournissant une sortie continue, comme les modèles suivants:
- carte avec micro electret et ampli MAX4466, sur Adafruit ou encore chez snootlab (nous reviendrons sur cette carte dans un billet ultérieur);
- carte avec micro electret et ampli MAX9814 chez Adafruit (un peu plus sophistiquée);
- carte avec microphone MEMS SPW2430, chez Adafruit, moins chère et plus basique.
Conclusions
Est-ce que cette carte fonctionne? Oui, elle fait le boulot. La sortie ne m’a pas paru extrêmement stable (elle ne reste pas toujours à 0,même quand il y a du bruit), donc je pense qu’il y a quelques ajustements à faire dans le code. La sortie du capteur est binaire, ce qui fait qu’il est moins sophistiqué que les autres capteurs mentionnés, mais à un prix aussi bas, je suppose qu’on ne peut pas en demander beaucoup plus!
En pratique, c’est un capteur qui fonctionne, et facilement. Je vous ferai des retours plus tard, en comparant ce que fournit ce capteur et celui d’Adafruit.
Composants de R.Ian – pièces à imprimer ou acheter
Dans un précédent billet, nous avons vu les objectifs qui ont guidé la conception de R.Ian, et dans le suivant détaillé la conception paramétrique des roues. Nous allons maintenant nous pencher sur les composants de R.Ian, à savoir la liste exhaustive des éléments nécessaires pour le construire de A à Z.
Voyons en pratique la liste des composants de R.Ian :
Composants de R.Ian à imprimer en 3D :
- le châssis de R.Ian à imprimer en PLA, qui m’a pris environ 1h30 sur mon imprimante, pour 11m de filament, soit 32g, pour un coût de 1€ (plus de détails sur le châssis dans ce billet);
- les roues également à imprimer en PLA, 25 minutes par roue, 2.5m, 8g, 0.23€ par roue, soit au total environ 50 centimes pour les deux roues (plus de détails sur les roues dans ce billet);
- les pneus à imprimer en ninjaflex (pneus lisses ou pneus rainurés), qui prennent 30 minutes par pneu, pour 2m de filament soit 6g, ce qui fait 60 centimes par pneu, donc 1.2€ pour les deux (moins cher pour les lisses : 0.8€) (plus de détails sur les pneus dans ce billet);
- la plaque de support de l’électronique, à imprimer en PLA, qui prend 20 minutes à imprimer, pour 2m de filament/6g et revient à 17 centimes;
- le support du servomoteur à imprimer en PLA, 10 minutes, 3g, 1m, pour 8 centimes.
Au total, les composants de R.Ian à imprimer reviennent à 2.91€ pour le filament, pour un peu moins de 3 heures d’impression 3D à des vitesses normales, et on en a pour 57g de PLA et 12g de ninjaflex.

le pneu de R.Ian plié

Roue de R.Ian avec pneu et fixation de servomoteur.

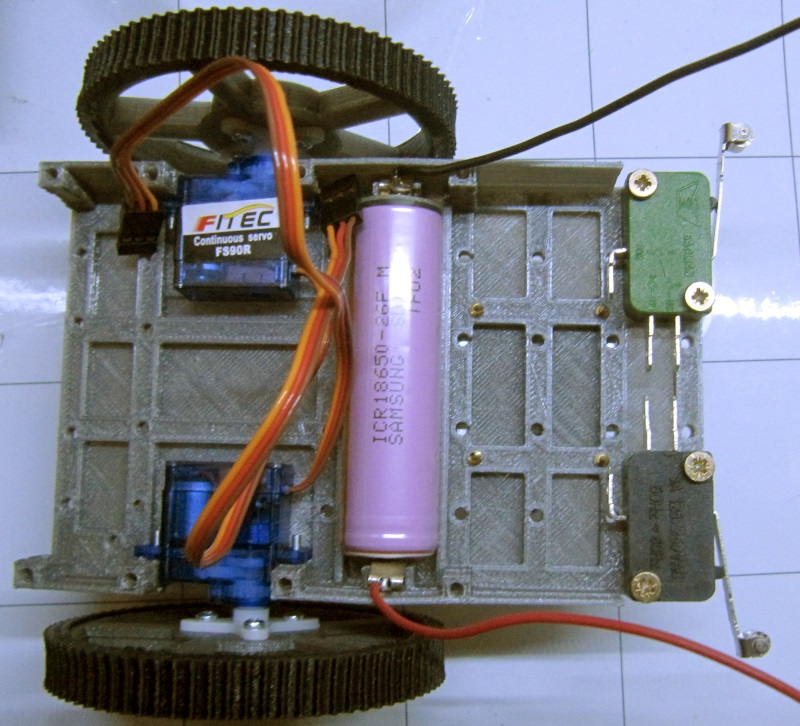
châssis de R.Ian en PLA gris. Il s’agit de la version à servomoteurs.
Composants de R.Ian à acheter
- Une batterie lithium 18650B, d’une valeur de 2 à 5€ (panasonic 3400mAh à l’unité ici,en pack de 4 là, généralement moins chères par pack de 10, voire aussi les samsung 2600mAh, moins chères pour une capacité plus faible de 23%);
- un circuit de charge pour la batterie lipo (pack de 10 pour 2€ ici) 0.2 à 1€
- une boite à batteries 18650 (on veut juste les contacts métalliques) : 2€
- un arduino nano d’une valeur d’environ 2€, aussi disponible par pack de 5;
- deux microswitches à levier (les capteurs de contact) (à l’unité ici, ou en pack de 10 là);
- un régulateur step-up 3v vers 5v ( pack de 10, 1A en sortie, pack de 2, 1A en sortie, unité, 1A en sortie, unité, 3A en sortie) : 1 à 5€
- deux servomoteur à rotation continue (pack de 5 ici, pack de 10 roues adaptées là -inutile sauf si vous préférez celles là-, à l’unité chez pololu -USA- ) : 3 à 5€ l’unité, soit 6 a 10€ au total (je cherche une solution de remplacement);
- une carte perfboard 5*7cm (pack de 10, 4 différentes dont 1 bonne à pas cher, pack de 10 plus bas de gamme, moins bien, à vraiment pas cher) : 0.15 à 1€;
- câbles Dupont femelle-femelle (pack de 40 ici) environ 2.5€;
- connecteurs 2.5″ mâles (pack de 10) : 1€
- Switch 2 positions (on/off) (pack de 20 ici) : 0.1€
- une roue sur pivot (je dois trouver une référence, j’ai acheté la mienne au magasin de bricolage local pour quelques euros);
- environ 20 vis de 3mm;
- environ 10 vis m2.

fitec fs90r servomoteur à rotation continue

le servomoteur qui permet d’orienter le capteur de distance

installation de la roulette sur pivot de R.Ian
A ce point, nous avons toutes les pièces nécessaires pour un robot minimal pour un peu moins de 27€. Les éléments suivants sont facultatifs, mais tout de même recommandés :
- Un micro servo 9g SG92R, de tower pro (pack de 2 ici pour 5€, pack de 5 pour 10€, pack de 10 pour 18€) : 2 à 3€
- un capteur Sharp GP2Y0A21 10-80cm (avec câble!) : environ 5€
- un support (je cherche la pièce, sinon je ferai une pièce à imprimer!).
- des leds RGB adressables WS2812 (3€ le mètre/30leds ici, il nous faut environ 15-20 cm ou quelques leds, 2 a 8, au choix) : 2-3€
Avec tout cela, nous avons les éléments du robot pour environ 35€, en incluant des options qui ne sont pas nécessaires, mais sympathiques. Nous considérerons que ces options font partie du robot de base, mais elles restent des options car elles peuvent être enlevées si souhaité, tandis que le reste est nécessaire au fonctionnement de R.Ian
Le robot est amené à changer un peu, avec notamment un étage optionnel supplémentaire, pour accueillir un raspberry pi zero (5€), ou un autre modèle (le zero est préféré car moins cher, mais je ferai les pièces pour les autres modèles), mais aussi une carrosserie (une nouvelle pièce à imprimer), qui protégera l’électronique et les capteurs, tout en fournissant une poignée pour attraper le robot, et en gardant l’avant ouvert pour le capteur optique (toutefois couvert par dessus, celui ci étant fragile, surtout monté sur le servomoteur). Cette pièce devrait augmenter le prix total d’un euro environ.
Enfin, le système de roues actuel ne me satisfait pas, la roue sur pivot à l’avant était trop chère, et les axes des servomoteurs sont trop fragiles. Ces servomoteurs sont de plus de qualité un peu médiocre, je pense donc passer à des moteurs DC classiques. Il faudra donc que je conçoive un système imprimable de roue sur pivot, ou alors que je passe à un système de chenilles. J’ai déjà des moteurs en tête, et j’ai conçu le système de fixation des roues sur ces moteur, il me font concevoir les chenilles et les roues libres. L’objectif est aussi de rendre le robot plus solide, pour un usage scolaire.
Dans un prochain billet, je reviendrai sur divers éléments de la conception, comme par exemple les roues, qui sont hautement paramétrables (nombre de rayons, taille, épaisseur, pneus etc).
REA – motorisation : choix des composants
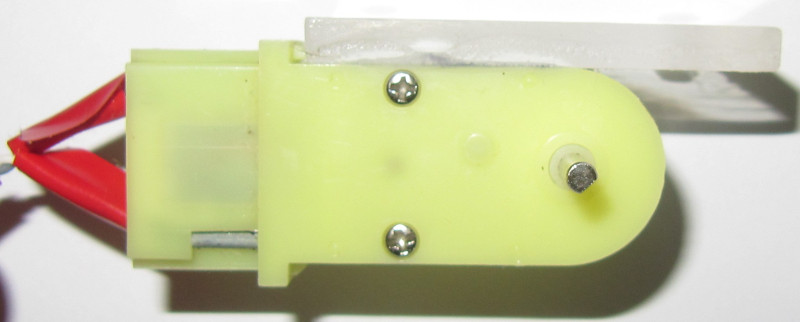
Pour notre programme REA, nous développons un Rover d’Exploration Autonome. A la précédente étude, nous avons étudié les modes de déplacement accessibles, avant d’opter pour un système basé sur des roues/chenilles, avec un système de conduite différentielle.
L’objectif sera d’utiliser une source d’énergie quelconque pour générer un mouvement de rotation pour entraîner les roues. Puisque nous avons choisi la conduite différentielle, il nous faudra deux moteurs (ou N paires).
Étudions maintenant les solutions de motorisation qui nous sont accessibles.
Débuter avec les esp8266 : connexion esp2866 série USB
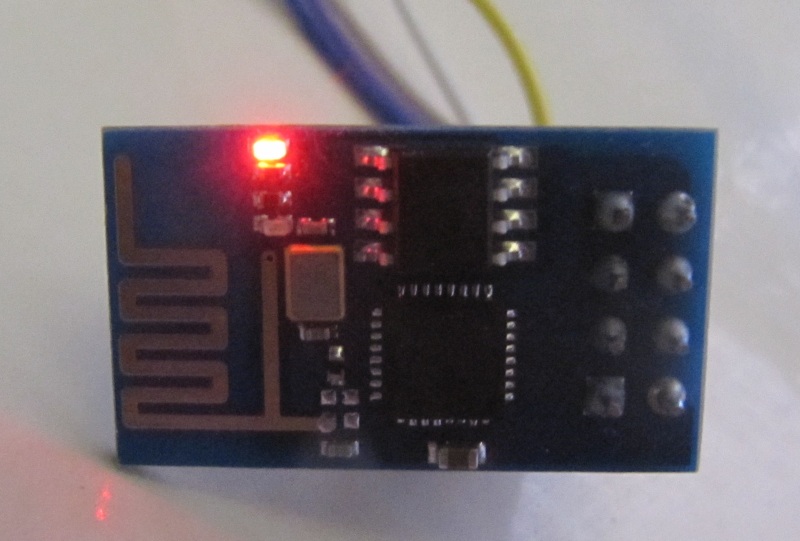
Dans ce billet, nous verrons comment connecter un module esp8266 à un ordinateur pour pouvoir le configurer et lui envoyer des commandes. Cela nous permettra de vérifier que le module est fonctionnel, mais également de pouvoir le paramétrer. Nous utiliserons également ce schéma de connexion ultérieurement pour pouvoir mettre à jour le firmware (nouvelle version ou alors un firmware alternatif tel que nodemcu).
Alitest : écran LCD 10 pouces HDMI 1280×800 IPS
Le Raspberry pi est capable d’utiliser des écrans HDMI variés, du moniteur d’ordinateur à la télévision de salon. Toutefois, pour certains projets, on peut souhaiter utiliser un écran plus compact, sans se ruiner. Dans cet article, nous testerons un écran LCD 10 pouces HDMI 1280×800 IPS acheté sur Aliexpress. aux alentours de 60€. Il existe des écrans moins chers pour cette diagonale, mais celui ci à l’avantage d’avoir une définition de 1280×800, donc compatible avec le 720p (les modèles moins chers sont plutôt en 1024×600), et également d’être vendu comme ayant une dalle IPS. Nous verrons donc ce que vaut cet écran en pratique, ce que l’on reçoit, et comment assembler le tout (très simple), et nous vérifierons qu’il s’agit bien d’un IPS.
DS3231 Raspberry pi RTC : ajouter une horloge temps réel I2C – Alitest
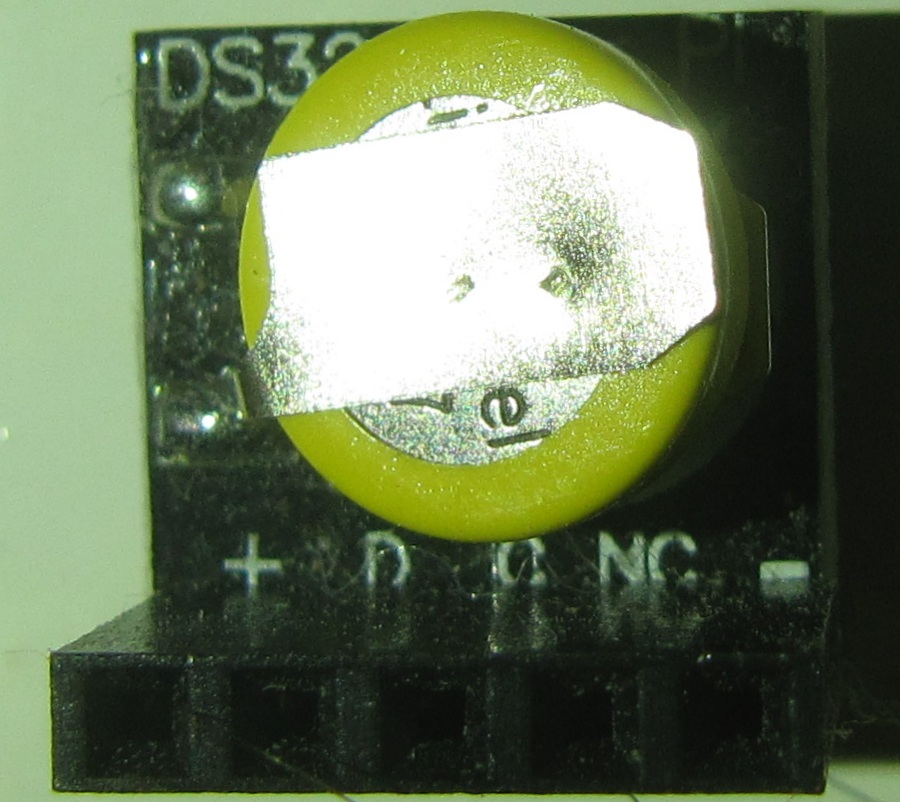
Le Raspberry pi ne dispose pas de module RTC (Real Time Clock, horloge en temps réel), et ne peut donc pas garder une trace précise du temps écoulé sans avoir recours à une synchronisation sur un serveur de temps (NTP). Cela n’est pas toujours possible, notamment pour des projets ou le Raspberry Pi n’est pas connecté au réseau. Pour remédier à cela, il est possible d’ajouter un module RTC tel que le DS3231, économique, compact et précis. Nous verrons dans ce tutoriel comment réaliser cela.
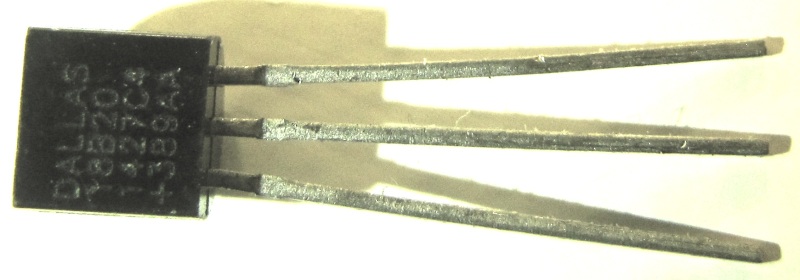
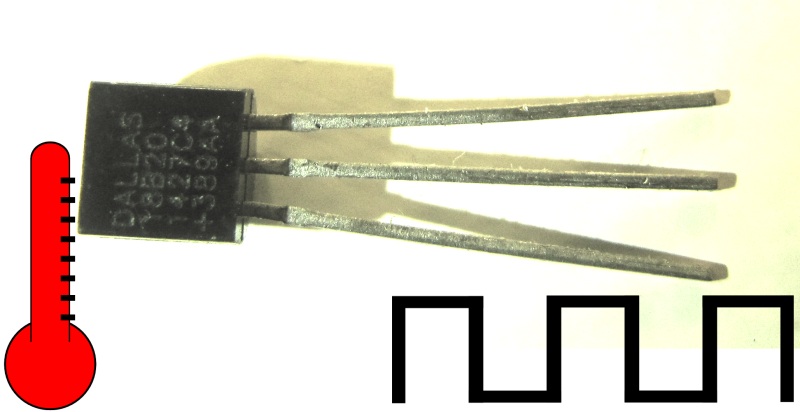
DS18B20 Raspberry pi – Mesurer la température avec une sonde numérique
Pour mesurer la température, il est possible d’utiliser divers capteurs, tels que le TMP36, le DHT11/DH22, ou encore le DS18B20. C’est à cette dernière sonde que nous nous intéresserons aujourd’hui. Il s’agit d’une sonde numérique (pas besoin de convertisseur analogique-numérique tel que le MCP3008) qui est assez précise (±0.5°C sur la plage -10°C – 85°C), raisonnablement facile à utiliser, et consommant peu. Par rapport à une sonde analogique, c’est un peu plus complexe, puisqu’il faut utiliser le protocole dallas 1-wire, mais nous verrons qu’il y a déjà les outils nécessaires pour exploiter tout cela.
Alitest : WS2812 chinoises – led adressables type neopixels

Aujourd’hui, nous allons tester des leds adressables, les WS2812 et WS2812B, en provenance de Aliexpress. Ces leds sont similaires à ce qu’Adafruit appelle les NeoPixels. En pratique, il s’agit de LED RGB, donc capable de produire toutes les couleurs que vous souhaitez utiliser, et adressables, c’est à dire qu’on peut contrôler chaque LED individuellement. Ces LED sont chainées, ce qui fait qu’on utilise un seul GPIO pour contrôler l’ensemble, et on peut placer plusieurs ensembles les uns à la suite des autres. On a généralement 3 câbles : l’alimentation 5V, la masse, et le câble de signal. Que valent ces exemplaires achetés sur Aliexpress? C’est ce que je vous propose de découvrir aujourd’hui, avec deux modèles :
Raspberry pi mobile – mesure de la tension de la batterie
Suite à mes premiers tests sur un Raspberry pi mobile utilisant une batterie lipo qui a permis plus de 40 heures d’autonomie, je poursuis les expérimentations dans le domaine. Nous reprendrons le même montage, mais nous ajouterons un convertisseur analogique vers numérique afin de pouvoir mesurer la tension de la batterie. Nous ajouterons également une charge activable sur commande pour représenter une activité plus lourde, et nous établirons des profils de consommation, et chercherons une méthode d’estimation de l’autonomie restante en fonction de la tension mesurée de la batterie.
Mesurer une tension avec un pont diviseur de tension
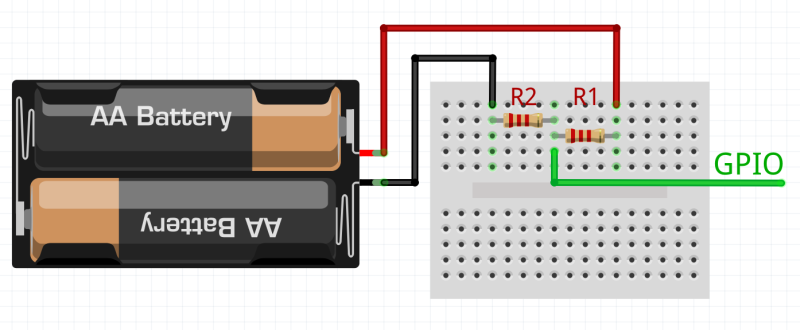
Si l’on mesure une tension, il faut que celle ci soit inférieure aux tensions admissibles par le composant qui les mesure. Généralement il s’agit de la tension d’alimentation du composant : un composant alimenté en 5V mesurera des tensions jusqu’à 5V par exemple. Si l’on dépasse la valeur limite, on risque de détériorer le composant qui mesure la tension. Mais que faire dans ce cas si l’on souhaite mesurer une tension plus élevée? Par exemple, si avec votre Arduino, vous souhaitez mesurer la tension d’une batterie de voiture? Il est possible dans ce contexte d’utiliser un pont diviseur de tension. Nous verrons dans cet article le principe, comment calculer les bonnes valeurs pour votre pont diviseur et également comment le réaliser et s’en servir.
Capteur PIR et Arduino : Tutoriel
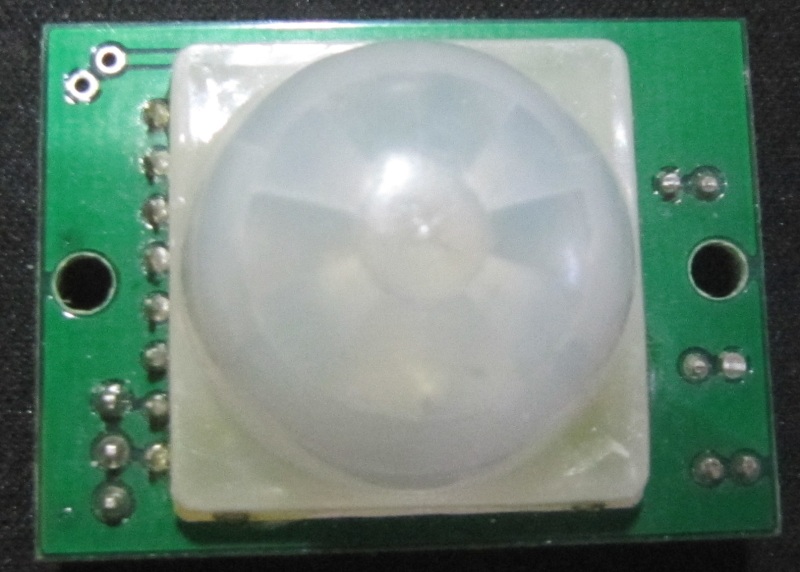
capteur PIR
Les capteurs PIR, pour Passive Infrared Sensor (capteur infrarouge passif) permettent de détecter la présence d’humains mobiles dans le champ du capteur (ça ne fonctionne pas avec les zombies!). Ils sont utilisés dans divers systèmes de sécurité et détecteurs de mouvements. On en trouve à bas coût, et ils sont très simples à utiliser. Cet article servira de tutoriel sur l’utilisation d’un capteur PIR avec un Arduino.
Alitest : écran lcd 40×2
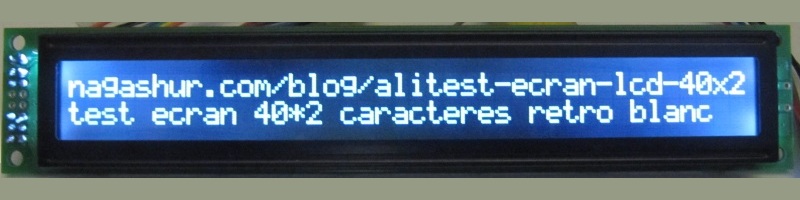
On peut trouver sur Aliexpress des écrans LCD de 40 caractères sur 2 lignes (appelés 40×2), avec diverses couleurs de rétro-éclairage. J’en ai sélectionné un modèle avec rétro-éclairage blanc, acheté chez Buydisplay pour 29€ le pack de 2, frais de ports inclus. Je vous propose dans ce billet un test de cet écran, ainsi qu’un petit guide d’assemblage et de connexion à un Arduino. L’écran fonctionne il correctement? Est il lisible? Fonctionne il comme les écrans HD44780 habituels? Réponse dans ce billet!
Alitest : Arduino nano clone chinois
{kind=link}
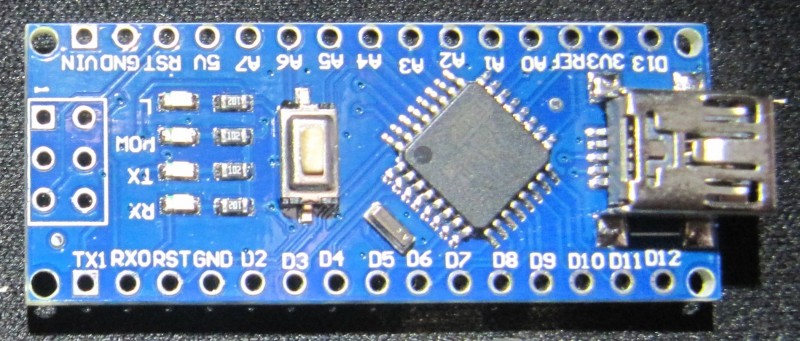
Le Arduino Nano est un Arduino complet, mais dans un format plus compact que celui des Uno ou Leonardo. En voici une description détaillée en français sur hardware-libre.fr, et la fiche produit en anglais sur le site officiel. Cette carte s’appuie sur un ATMega328p, comme les Uno, mais utilise un composant de surface (voir galerie plus bas) qui permet une carte compacte, avec un port mini-USB, et des connecteurs mâles au lieu de connecteurs femelle. On en trouve aux alentours de 20€ au moment de l’écriture de cet article. Puisqu’il s’agit d’une carte au design libre, il est possible de produire des clones de la carte, pourvu qu’on utilise pas la marque Arduino sans accord des propriétaires. Aujourd’hui, c’est précisément de l’un de ces clones que nous parlerons.

Clone chinois d’Arduino Nano V3 dans son emballage d’origine, avec les connecteurs à souder
On peut en effet trouver sur Aliexpress des clones à l’unité, par lot de 5, ou encore par lot de 10, pour environ 2€ l’unité, avec les frais de port gratuits. Pour ce prix, on peut se permettre d’en utiliser pour de nombreux projets ou l’on aurait pas souhaité “gaspiller” un Arduino. Mais que valent ces puces? sont elles réellement utilisables? quelles sont les différences avec un Arduino Nano officiel? Je vous propose dans cet article de répondre à ces questions en vous présentant les modèles que j’ai achetés et utilisés dans divers projets. Notez au passage que le design peut être amené à évoluer, bien qu’on puisse s’attendre à ce qu’il reste compatible d’une version à l’autre.