Suite à mes premiers tests sur un Raspberry pi mobile utilisant une batterie lipo qui a permis plus de 40 heures d’autonomie, je poursuis les expérimentations dans le domaine. Nous reprendrons le même montage, mais nous ajouterons un convertisseur analogique vers numérique afin de pouvoir mesurer la tension de la batterie. Nous ajouterons également une charge activable sur commande pour représenter une activité plus lourde, et nous établirons des profils de consommation, et chercherons une méthode d’estimation de l’autonomie restante en fonction de la tension mesurée de la batterie.
You are browsing archives for
Catégorie : électronique
Mesurer une tension avec un pont diviseur de tension
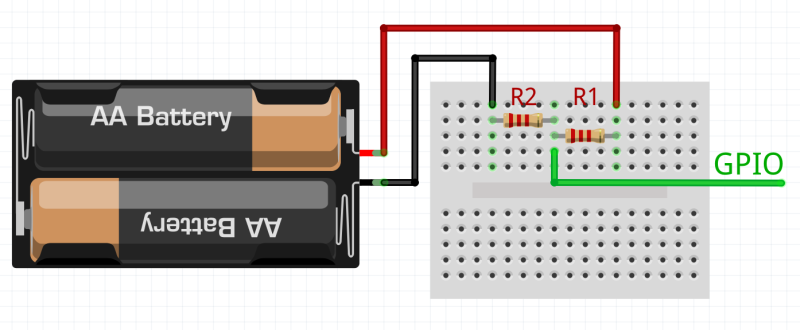
Si l’on mesure une tension, il faut que celle ci soit inférieure aux tensions admissibles par le composant qui les mesure. Généralement il s’agit de la tension d’alimentation du composant : un composant alimenté en 5V mesurera des tensions jusqu’à 5V par exemple. Si l’on dépasse la valeur limite, on risque de détériorer le composant qui mesure la tension. Mais que faire dans ce cas si l’on souhaite mesurer une tension plus élevée? Par exemple, si avec votre Arduino, vous souhaitez mesurer la tension d’une batterie de voiture? Il est possible dans ce contexte d’utiliser un pont diviseur de tension. Nous verrons dans cet article le principe, comment calculer les bonnes valeurs pour votre pont diviseur et également comment le réaliser et s’en servir.
Raspberry pi mobile LiPo : un système autonome et rechargeable à bonne autonomie
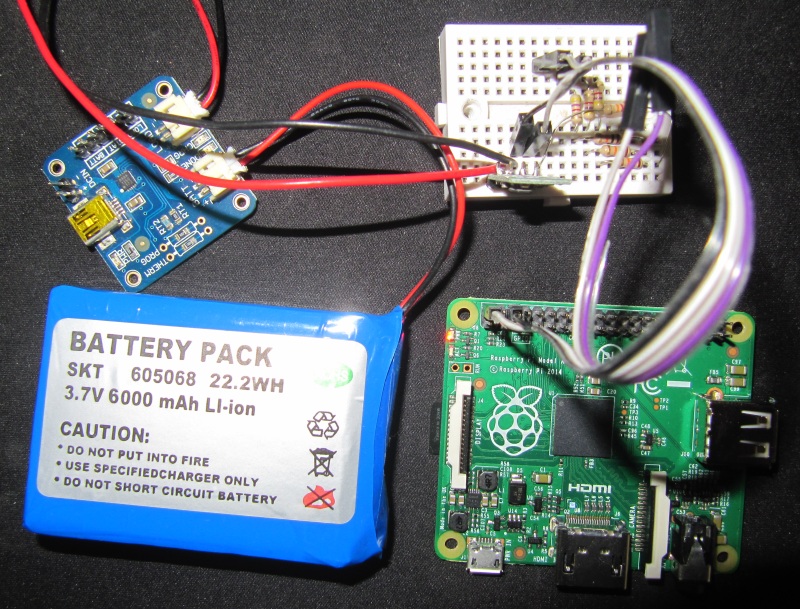
Le Raspberry pi est un ordinateur compact et économe en énergie. Il est donc logiquement une solution intéressante pour des projets embarqués. Je vais donc présenter ici un montage permettant de faire un Raspberry pi portable avec une batterie rechargeable Lithium Polymère, et un chargeur efficace. L’objectif final sera d’avoir un système qu’on puisse utiliser indifféremment sur secteur ou sur batterie, sans interruption, comme avec un ordinateur portable classique.
Capteur PIR et Arduino : Tutoriel
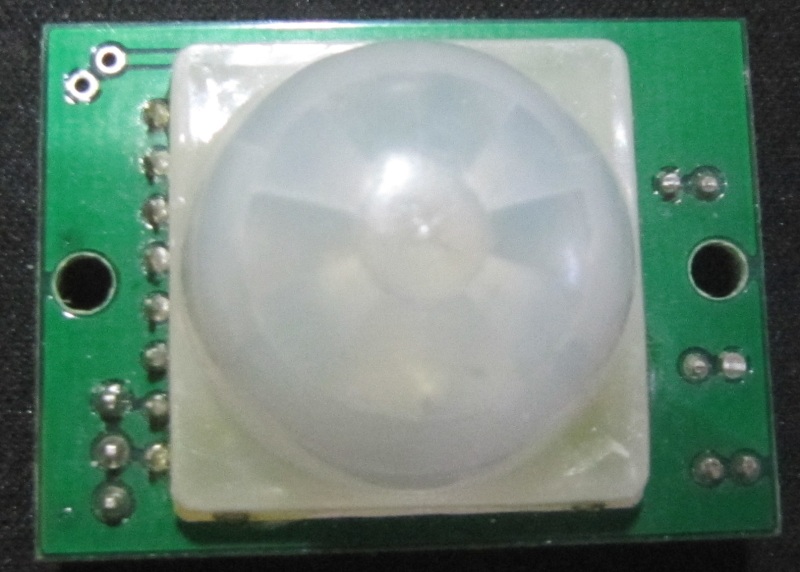
capteur PIR
Les capteurs PIR, pour Passive Infrared Sensor (capteur infrarouge passif) permettent de détecter la présence d’humains mobiles dans le champ du capteur (ça ne fonctionne pas avec les zombies!). Ils sont utilisés dans divers systèmes de sécurité et détecteurs de mouvements. On en trouve à bas coût, et ils sont très simples à utiliser. Cet article servira de tutoriel sur l’utilisation d’un capteur PIR avec un Arduino.
Alitest : écran lcd 40×2
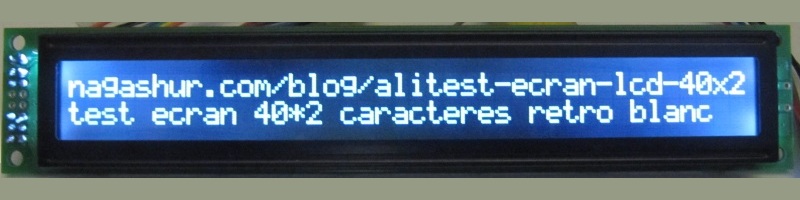
On peut trouver sur Aliexpress des écrans LCD de 40 caractères sur 2 lignes (appelés 40×2), avec diverses couleurs de rétro-éclairage. J’en ai sélectionné un modèle avec rétro-éclairage blanc, acheté chez Buydisplay pour 29€ le pack de 2, frais de ports inclus. Je vous propose dans ce billet un test de cet écran, ainsi qu’un petit guide d’assemblage et de connexion à un Arduino. L’écran fonctionne il correctement? Est il lisible? Fonctionne il comme les écrans HD44780 habituels? Réponse dans ce billet!
Contrôleur de LED simple utilisant un TIP120
Dans le cadre du projet Domochevsky, nous cherchons à implémenter un système d’éclairage intelligent, tel que nous en avons discuté dans ce précédent billet. Nous n’implémenterons pas toutes les fonctionnalités décrites immédiatement, mais nous allons créer une base simple et extensible sur laquelle nous pourrons construire la suite du projet. Nous décrirons ici une version minimale, facile à mettre en oeuvre, mais malgré tout apte à recevoir des ajouts ultérieurs, présentés dans les billets suivants.
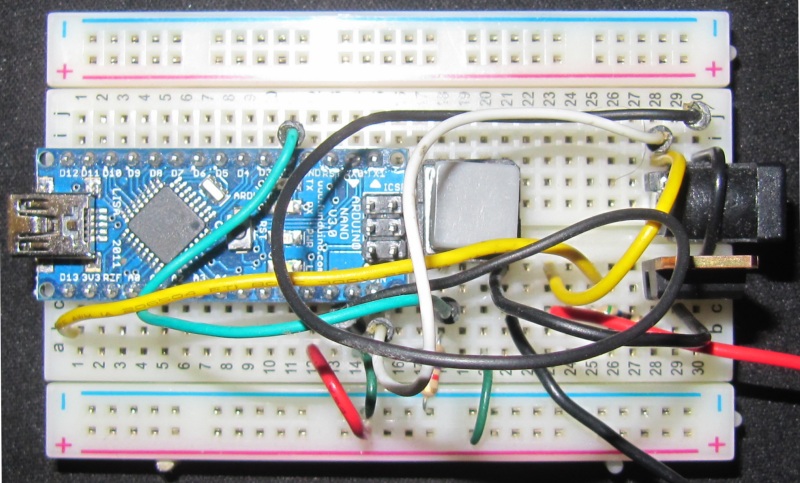
Alitest : Arduino nano clone chinois
Le Arduino Nano est un Arduino complet, mais dans un format plus compact que celui des Uno ou Leonardo. En voici une description détaillée en français sur hardware-libre.fr, et la fiche produit en anglais sur le site officiel. Cette carte s’appuie sur un ATMega328p, comme les Uno, mais utilise un composant de surface (voir galerie plus bas) qui permet une carte compacte, avec un port mini-USB, et des connecteurs mâles au lieu de connecteurs femelle. On en trouve aux alentours de 20€ au moment de l’écriture de cet article. Puisqu’il s’agit d’une carte au design libre, il est possible de produire des clones de la carte, pourvu qu’on utilise pas la marque Arduino sans accord des propriétaires. Aujourd’hui, c’est précisément de l’un de ces clones que nous parlerons.

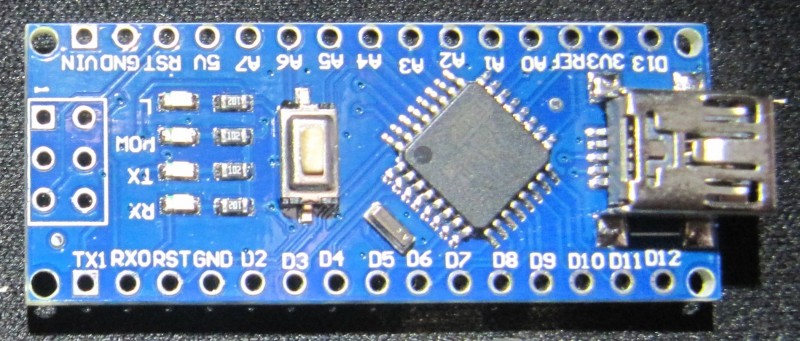
Clone chinois d’Arduino Nano V3 dans son emballage d’origine, avec les connecteurs à souder
On peut en effet trouver sur Aliexpress des clones à l’unité, par lot de 5, ou encore par lot de 10, pour environ 2€ l’unité, avec les frais de port gratuits. Pour ce prix, on peut se permettre d’en utiliser pour de nombreux projets ou l’on aurait pas souhaité “gaspiller” un Arduino. Mais que valent ces puces? sont elles réellement utilisables? quelles sont les différences avec un Arduino Nano officiel? Je vous propose dans cet article de répondre à ces questions en vous présentant les modèles que j’ai achetés et utilisés dans divers projets. Notez au passage que le design peut être amené à évoluer, bien qu’on puisse s’attendre à ce qu’il reste compatible d’une version à l’autre.
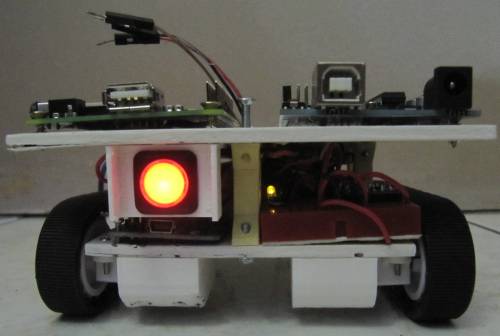
R.Damil : un mini robot Atmega328p (puce d’Arduino) minimaliste, simple et économe en énergie.
A quel point un robot peut il être simple à concevoir? Il y a un moment (en 2013), je me suis demandé à quoi ressemblerait le robot le plus simple que je pourrais fabriquer. Je vous propose de découvrir dans ce billet le résultat.
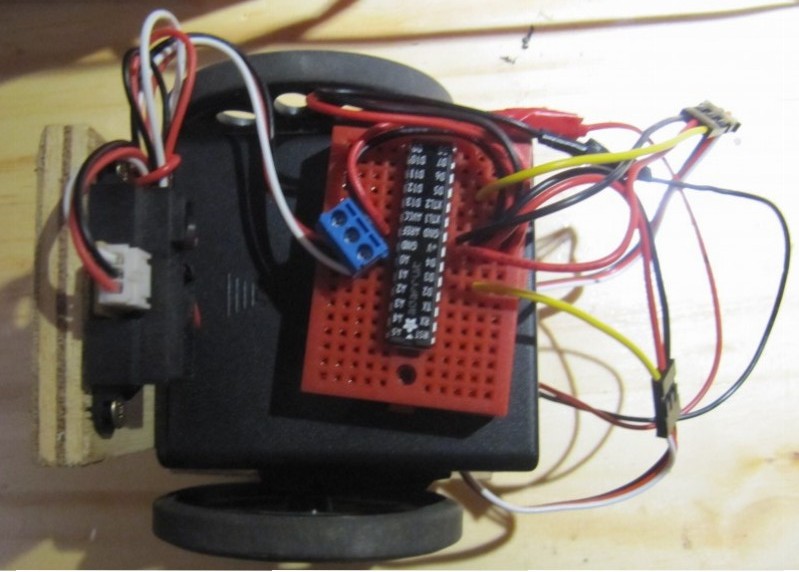
R.Eikki : Construction du mini robot basse consommation
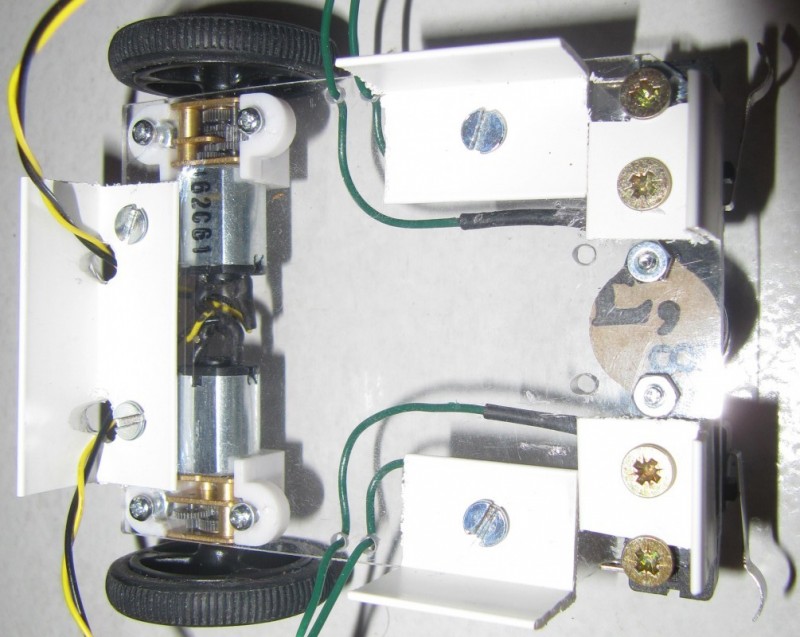
R.Eikki est un robot pensé pour être économe en énergie et donc avoir une grande autonomie.
Les robots peuvent être plus ou moins gros, complexes, voir puissants. Mais pour ce projet, nous nous intéressons à l’autonomie. L’objectif du prototype R.Eikki est de concevoir un robot ayant la plus grande autonomie possible, tout en restant compact. On ne cherchera donc pas à mettre des tonnes de batteries, mais plutôt pour un matériel donné, à optimiser la consommation au maximum pour en tirer la plus longue durée de fonctionnement possible sur une charge de batterie.
j’ai discuté ce sujet en profondeur sur le forum robot-maker. Cliquez ci dessous pour voir la galerie sur ce robot.
Conception d’un système d’éclairage automatisé, décentralisé et ergonomique
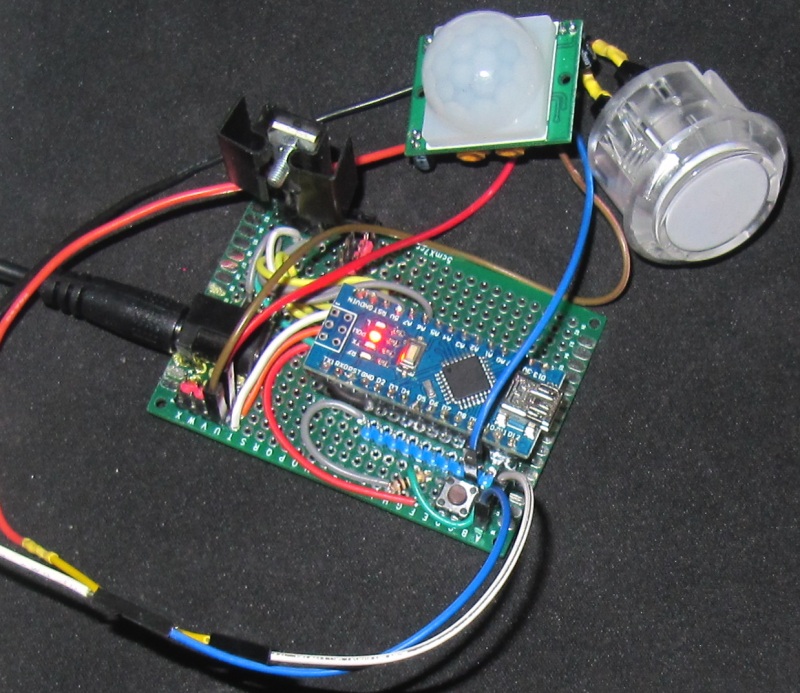

contrôleur d’éclairage vu de dessus

contrôleur d’éclairage vu de dessus
Les éclairages d’une habitation sont souvent contrôlés de façon binaire : allumés ou éteints. Avec des lampes fluocompactes ou encore des ampoules à filament, cela peut se justifier pour diverses raisons. Toutefois, grâce à l’électronique programmable du genre des Arduino, il est possible de faire mieux, tout en utilisant des technologies plus modernes telles que les LED pour faire quelquechose de plus sophistiqué, tout en restant simple.
L’objectif de ce projet est triple :
- permettre un contrôle décentralisé de l’éclairage (on est pas limités au seul interrupteur mural);
- automatiser la gestion de l’éclairage (allumage et extinction quand nécessaire), en laissant toutefois un contrôle total à l’utilisateur;
- affiner le contrôle qu’a l’utilisateur sur les sources d’éclairage ainsi que l’ergonomie de celles ci (intensité, allumage progressif, etc).
Nous verrons ici comment atteindre ces objectifs et développer un système économique, peu gourmand en énergie, facile à utiliser tout en étant adaptable et sophistiqué.
Configuration de l’I2C sur un Raspberry Pi
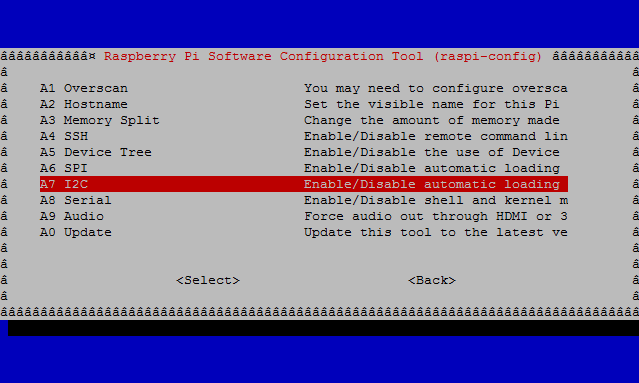
Nouveau tutoriel : Configuration de l’I2C sur un Raspberry Pi.
Le bus I2C (ou I²C), pour Inter Integrated Circuit, a été développé en 1982 par Philips et permet de connecter divers équipements électroniques entre eux. Il dispose d’un système d’adressage permettant de connecter de nombreux périphériques I2C sur les mêmes câbles, ce qui signifie ici que l’on utilisera un nombre restreint de GPIO, quel que soit le nombre de périphériques I2C installés. Dans le contexte du Raspberry Pi, ce bus est très utile, puisqu’il permet de rajouter diverses fonctionnalités. On trouvera par exemple des puces pour ajouter des GPIO, des horloges temps réel, des capteurs, et bien d’autres composants en I2C. Par défaut, l’I2C n’est pas forcément activé, et nous verrons comment faire cela.
Pour lire la suite du tutoriel, suivez ce lien :
Liste de tutoriels Raspberry pi sur le wiki
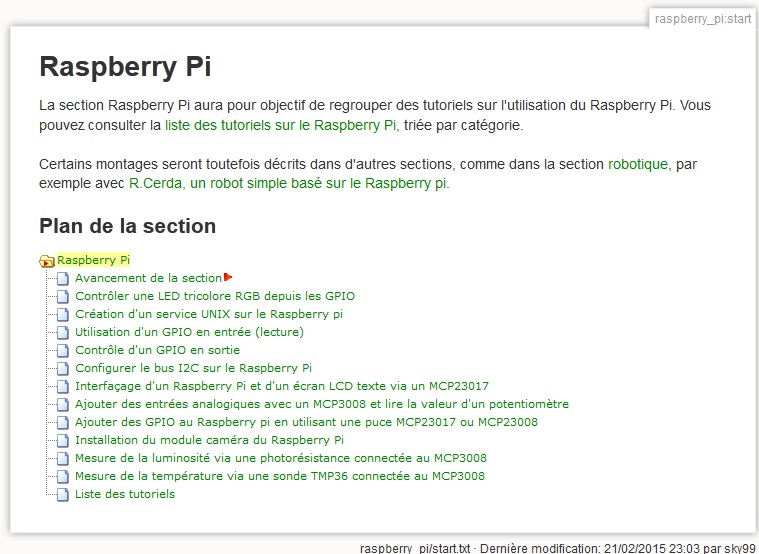
J’ai commencé à porter les tutoriels Raspberry Pi sur le wiki. Je remets donc en forme, corrige, actualise et améliore les anciens tutoriels, tout en ajoutant de nouvelles ressources. Si vous êtes donc intéressés par le Raspberry Pi, et vous demandez comment réaliser une chose en particulier, n’hésitez pas à vous rendre dans la section Raspberry pi du wiki (http://nagashur.com/wiki/doku.php?id=raspberry_pi:start).
Pour l’instant voici la liste de tutoriels Raspberry pi postés :
- Contrôler des GPIO en sortie;
- Contrôler des GPIO en entrée (lecture);
- Gérer une LED RGB via les GPIO du Raspberry Pi;
- Ajouter des entrées analogiques au Raspberry Pi via un MCP3008, et lire la valeur d’un potentiomètre;
- Ajouter des GPIO supplémentaires au Raspberry Pi via une puce MCP23008 ou MCP23017;
- Mesurer la luminosité ambiante via une photorésistance en utilisant le MCP3008;
- Mesurer la température via la sonde analogique TMP36 et un MCP3008;
- Ajouter un écran texte au Raspberry Pi via un MCP23017/MCP23008;
- Créer un service UNIX sur le Raspberry pi.
Au passage, dans la section Robotique du Wiki, j’ai porté les tutoriels sur la création d’un robot basé sur le Raspberry Pi, R.Cerda.
Un nouveau robot basé sur le Raspberry Pi : R.Hasika
J’ai commencé la construction d’un nouveau robot basé sur le Raspberry pi, R.Hasika.
Celui ci reprend les bases du précédent, R.Cerda, mais en améliorant l’ensemble avec une conception plus précise. L’objectif de ce robot est de pouvoir obtenir un déplacement rectiligne et précis, et des rotations exactes. Ainsi, il devrait être possible de mesurer le déplacement du robot, et de calculer sa position en fonction des déplacements effectués par rapport au point de départ.
L’un des objectifs est de pouvoir faire en sorte que R.Hasika soit capable de se déplacer dans un environnement pour accomplir une mission quelconque, puis de revenir à un point précis afin de pouvoir se recharger automatiquement.
La conception de ce robot est ouverte, je fournis donc les plans et fichiers permettant de reproduire exactement le même robot, ainsi que les scripts permettant d’en modifier certains paramètres (largeur, hauteur, etc).
Pour plus d’informations, les fichiers, des explications, les plans, scripts et codes sources, rendez vous sur la page centrale du projet R.Hasika (http://nagashur.com/wiki/doku.php?id=robotique:r_hasika:start).
Pour voir l’avancement du projet, rendez vous sur la page d’avancement de R.Hasika (http://nagashur.com/wiki/doku.php?id=robotique:r_hasika:avancement).
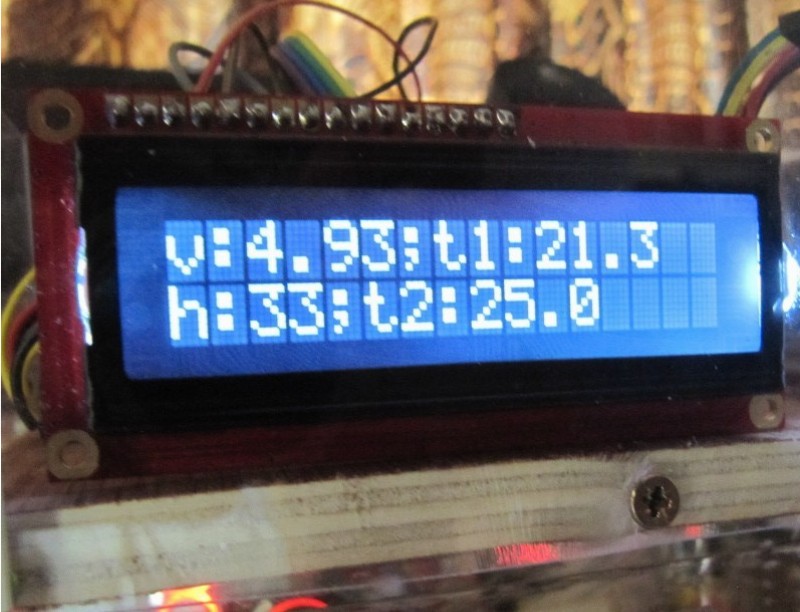
Contrôleur d’aquarium : circuit de base

Aujourd’hui, je vais vous présenter rapidement le circuit de base de mon contrôleur d’aquarium. Pour l’instant, il y a juste un écran LCD, une sonde waterproof immergée dans l’aquarium, et une sonde prenant la température de l’air. Cette base est amenée à évoluer, mais je poste déjà les schémas simples de sorte que si quelqu’un veut juste ces fonctionnalités, elles sont facilement accessibles 🙂
Je mets également le code Arduino pour le schéma. Enfin, tant qu’à faire, je rajoute le fichier source frizing, au cas ou vous vouliez modifier le schema!
Création d’un contrôleur d’aquarium

Depuis quelques temps, je me suis mis aux aquariums, avec principalement des guppys. Mais je suis devenu fana de crevettes d’aquarium, telles les neocaridina heteropoda , maintenant appelées neocaridina davidi. Dans mon bac à crevettes, j’ai donc diverses crevettes, des micro poissons (rasboras brigitae et corydoras pygmaeus), mais aussi de nombreuses plantes (mousse de java, anubias barteri naine, diverses plantes gazonnantes …).
Pour que tout ce petit monde soit heureux, il faut que l’aquarium respecte certains paramètres, par exemple la lumière, la température, le PH, etc. En magasin spécialisé, on peut trouver du matériel dédié, mais il est souvent cher, et on a peu de possibilités de personnalisation. Par exemple, pour l’éclairage, ce sera des néons, qui peuvent être allumés ou éteints par un interrupteur. Pour la température, on trouve des thermomètres basiques sans possibilité de collecter les données.
Bref, je me dis que je peux faire mieux, moins cher, et plus adapté à mes besoins. Je vous propose donc de suivre avec moi mon projet de contrôleur d’aquarium, qui sera charger de mesurer les paramètres et si possible de les modifier automatiquement, avec toujours une possibilité de contrôle manuel, gérer l’éclairage, voire automatiser certaines tâches comme par exemple la gestion de la lumière ou la compensation de l’eau évaporée.
Interfacer un écran LCD texte avec un ATmega ou un Arduino

LCD Sparkfun 5V blanc sur noir
Dans l’optique de mon projet Milapli, Il faudra bien, à un moment donné, afficher les données quelquepart. Dans l’absolu, on pourrait se contenter de stocker ces données, puis d’y accéder par le réseau. Cependant, on peut trouver pour une dizaine d’euros des écrans LCD 2*16 caractères RGB, ou divers autres coloris. Avec un tel écran, il est possible d’afficher directement les informations de notre choix. Ils sont simples à utiliser, et permettent une visualisation directe des données. Dans le cas présent, j’utilise un écran 2*16 caractères, avec un rétro-éclairage blanc de Sparkfun, qui produit des lettres blanches sur fond noir. Ce modèle à un contraste très important, et je vous le recommande pour des projets devant être utilisés en extérieur. Nous allons ici voir comment connecter un tel écran à un ATmega328p (ça devrait fonctionner avec les autres ATmega), ou tout simplement un Arduino.