Bonjour à tous! Pour des robots, il faut souvent des roues. Non satisfait des roues disponibles, j’ai commencé le projet OpenWheel, permettant de créer des roues, engrenages, pneus et chenilles pour robots (le tout sous licences libres) de façon paramétrique et donc ajustable. Je n’ai pas encore écrit de vrais articles dessus sur ce site.
Cependant, j’en ai beaucoup discuté sur un forum ou je participe régulièrement, robot-maker.com. C’est un forum de passionnés de robotique, avec une communauté très accueillante, en français, avec beaucoup de retours très intéressants dans les sujets.
Je vous invite donc à consulter le sujet sur OpenWheels que j’ai créé sur Robot-Maker.com (et pourquoi pas donner votre avis?) 🙂
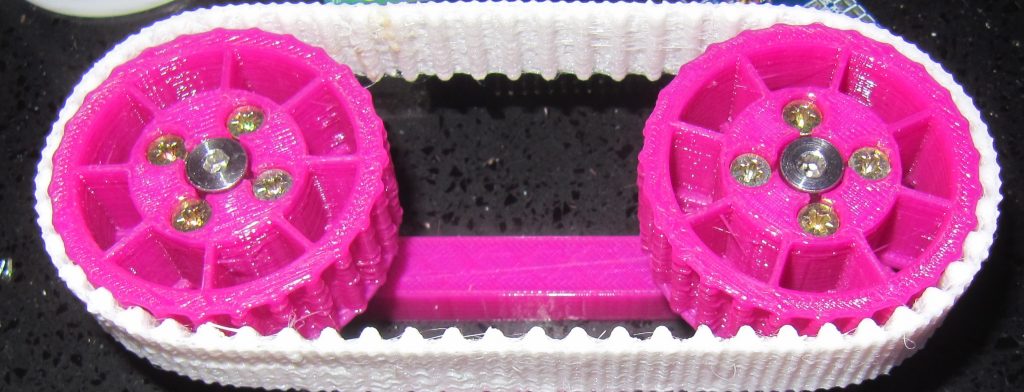
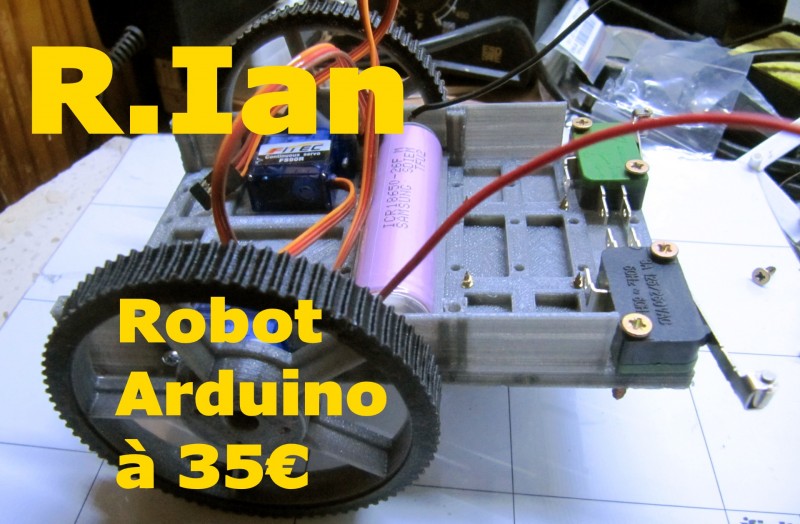
OpenWheel en configuration chenilles


 ).
).