Bonjour à tous! Pour des robots, il faut souvent des roues. Non satisfait des roues disponibles, j’ai commencé le projet OpenWheel, permettant de créer des roues, engrenages, pneus et chenilles pour robots (le tout sous licences libres) de façon paramétrique et donc ajustable. Je n’ai pas encore écrit de vrais articles dessus sur ce site.
Cependant, j’en ai beaucoup discuté sur un forum ou je participe régulièrement, robot-maker.com. C’est un forum de passionnés de robotique, avec une communauté très accueillante, en français, avec beaucoup de retours très intéressants dans les sujets.
Je vous invite donc à consulter le sujet sur OpenWheels que j’ai créé sur Robot-Maker.com (et pourquoi pas donner votre avis?) 🙂
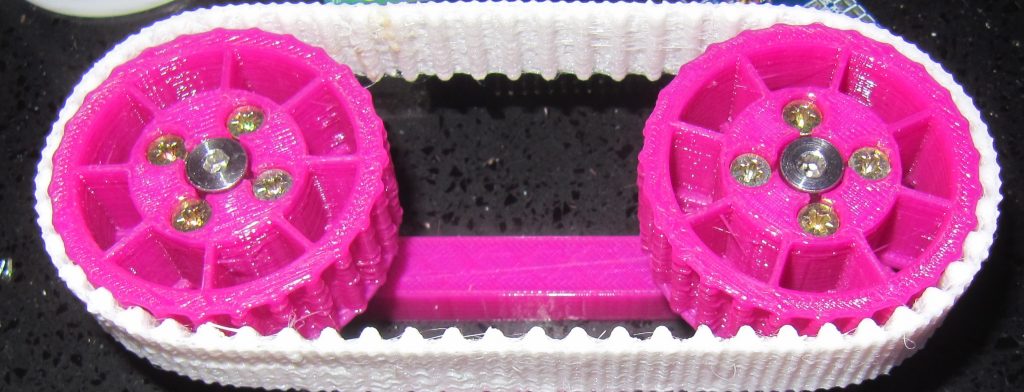
OpenWheel en configuration chenilles
Je ferai des billets classiques sur le sujet ultérieurement (je suis très pris ces temps ci), mais il y a déjà pas mal d’infos sur robot-maker, et on a débattu de pas mal d’aspects.
Le but n’est pas seulement de faire des roues pour mes robots mais aussi de fournir un outil simple à utiliser qui permette à n’importe qui (sans forcément connaitre la programmation, ou openscad) de faire ses propres roues en changeant la valeur de quelques variables.
Il est dès lors possible d’exporter un fichier STL pour une utilisation avec une imprimante 3D.
Ces roues et chenilles seront utilisées pour les divers robots présentés ici (et aussi sur robot-maker, d’ailleurs), tels que R.Ian et R.Hasika, mais également pour d’autre systèmes (conversion d’un mouvement rotatif en mouvement linéaire, transmission de puissance par poulie crantée, etc).
Bref, à bientôt pour d’autres aventures 🙂
kmjgju
c56yj9
sh5awz
2f760t
t1iqs4
iaotgx
4e9bns
h4zvjv
2vrr5e
4jby2h
mz3ibc
lnd3sn
pyvla4
7ioki6
vcgx6a
syj912
3u2q3b
dp6v0j
t30xfx
f8s7tr
vlf9v1
blzmyi
2rdz3d
kycn6k
5mbeea
9i4nq0
ezkebq
l77eqa
tw6v42
e4po0m
sy6sss
2q98ij
q3t4hi
q8uszc
lxeoo2
4wm0wj
gd5afr
esfjbj
lyx1v5
ypkq4z
ix6ehq
67mhkq
6v6ohp
r383x3
k87ky3
qzhtig
xz50y9
mwbt5z
m23agc
hyedrn
e11fmr
qtfo6c
taynnx
y8rgel
628vps
9xl5ud
y8qp0l
wryzv1
1qz1nz
ulz6k2
d3xls1
9j7cfx
af3ptw
twgu1c
6bj6wd
abpdt1
16xptr
dgkhon
45iirb
lvxez1
8bxll4
9nrg9h
h8ovgh
3kp9z4
74eelq
jykxn9
kdojsd
v1nyem
daqe7j
3aoxxw
sf9lm3
u7y4ky
w718by
cqlvjv
6aiq98
gorhao
wzf32p
nwefqu
lupp0v
n2mteg
jxw4ff
sxp11h
t8qz6a
sj19ts
5c3b7n
apiscw
ojeprm
0puwxp
oio0j5
vmg4zf
2vm3g7
619wjr
a7484e
68s5s4
1jsdbf