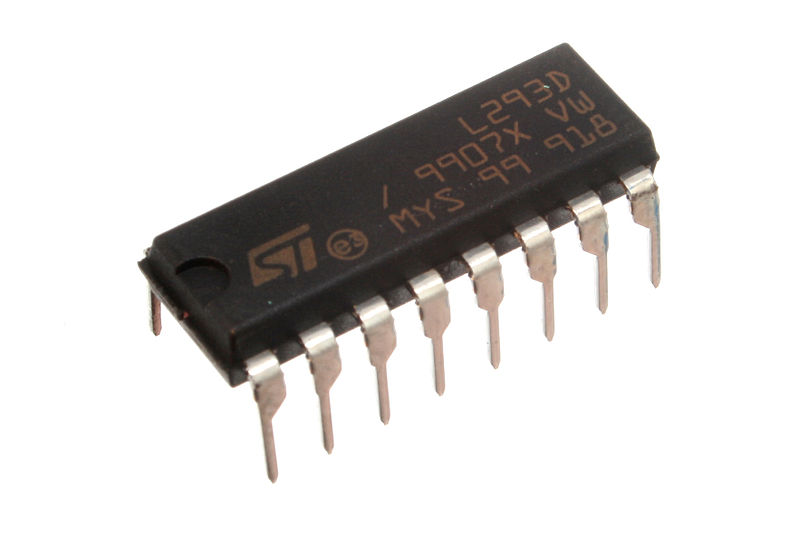

L293D Motor Driver
Si l’on branche un moteur à courant continu (DC Motor) à une source de courant adaptée, celui ci tournera. Si l’on veut inverser le sens de rotation, il suffit d’inverser le branchement. Cependant, inverser des branchements “à la main” ne convient pas à un robot. Nous verrons donc aujourd’hui comment contrôler le sens et la vitesse de rotation d’un ou deux moteurs en utilisant un circuit intégré L293D. Pour davantage de moteurs, il suffira de multiplier les puces L293D. Cette puce vaut environ 2.5$. Dans ce tutoriel, nous verrons comment interfacer cette puce avec un raspberry pi (les branchements). Ce tutoriel est également valable pour un Arduino ou tout autre microcontrôleur ayant des sorties programmables En savoir plus