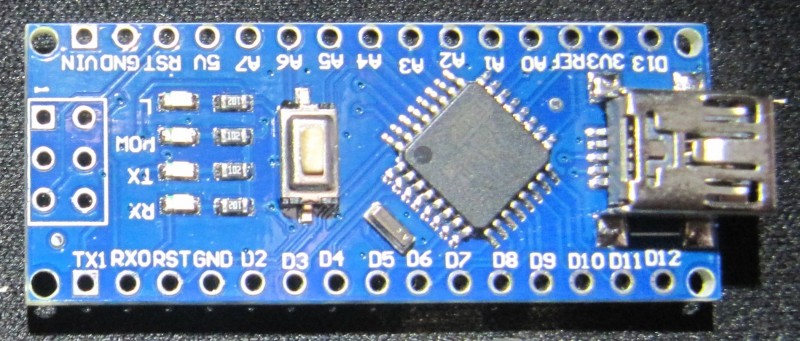
Le Arduino Nano est un Arduino complet, mais dans un format plus compact que celui des Uno ou Leonardo. En voici une description détaillée en français sur hardware-libre.fr, et la fiche produit en anglais sur le site officiel. Cette carte s’appuie sur un ATMega328p, comme les Uno, mais utilise un composant de surface (voir galerie plus bas) qui permet une carte compacte, avec un port mini-USB, et des connecteurs mâles au lieu de connecteurs femelle. On en trouve aux alentours de 20€ au moment de l’écriture de cet article. Puisqu’il s’agit d’une carte au design libre, il est possible de produire des clones de la carte, pourvu qu’on utilise pas la marque Arduino sans accord des propriétaires. Aujourd’hui, c’est précisément de l’un de ces clones que nous parlerons.

Clone chinois d’Arduino Nano V3 dans son emballage d’origine, avec les connecteurs à souder
On peut en effet trouver sur Aliexpress des clones à l’unité, par lot de 5, ou encore par lot de 10, pour environ 2€ l’unité, avec les frais de port gratuits. Pour ce prix, on peut se permettre d’en utiliser pour de nombreux projets ou l’on aurait pas souhaité “gaspiller” un Arduino. Mais que valent ces puces? sont elles réellement utilisables? quelles sont les différences avec un Arduino Nano officiel? Je vous propose dans cet article de répondre à ces questions en vous présentant les modèles que j’ai achetés et utilisés dans divers projets. Notez au passage que le design peut être amené à évoluer, bien qu’on puisse s’attendre à ce qu’il reste compatible d’une version à l’autre.