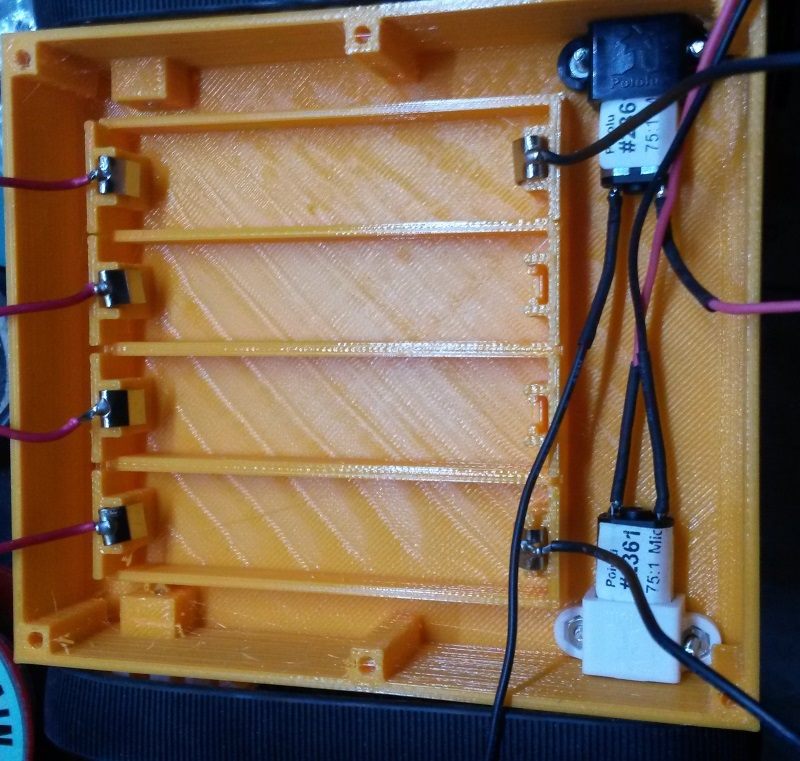
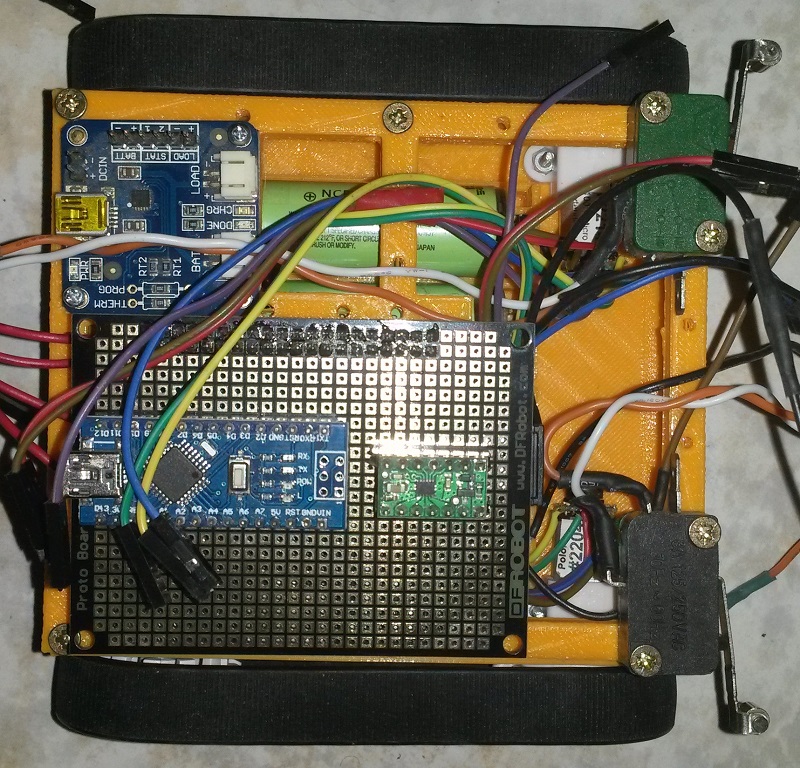
Dans cet article, nous décrirons la conception du châssis de R.Hasika, un robot pensé pour être robuste, précis et autonome, présenté dans ce précédent billet, et dont voici la page de projet. Le châssis du robot est un élément important, puisqu’il lui conférera sa solidité, mais aussi une partie de ses capacités finales. En pratique, un bon châssis permettra un robot précis, du fait du positionnement exact des composants. Le châssis de R.Hasika présenté dans ce billet est un châssis monocoque, en une seule pièce, fait pour être construit à l’imprimante 3D. Détaillons maintenant sa conception et les fonctionnalités qu’il apporte.
You are browsing archives for
Étiquette : conception
Programme REA : Rover d’Exploration Autonome – introduction
J’ai construit divers robots “comme ça”, sans planifier grand chose, pour apprendre, comme R.Cerda,pour lequel j’ai fait un tuto, ou encore mon projet de robot à haute autonomie. Aujourd’hui, je me dis que je peux progresser de façon plus structurée, plus scientifique, un peu comme un programme de recherche (c’est mon métier après tout  ).
).
Je démarre donc mon programme REA, pour Rover d’Exploration Autonome. Le but est de faire un rover capable de se déplacer seul dans un environnement donné de façon autonome. J’ai déja réalisé certains des objectifs de ce programme dans quelques uns de mes projets précédents. Cependant, je souhaite pour ce projet tout reprendre depuis le début, et mener les évolutions comme un projet de recherche classique (en m’inspirant, sans bien sur prétendre approcher ce niveau, du programme MER –Mars Exploration Rover— de la NASA).
J’aborde ce projet sous deux axes :
- L’axe scientifique;
- L’axe pédagogique.