R.Hasika – présentation
R.Hasika est le successeur de R.Cerda, un robot basé sur le Raspberry pi. Si à l’époque mon objectif était simplement de construire un robot basé sur le Raspberry pi, avec R.hasika, je suis plus ambitieux. En effet, il s’agit cette fois de concevoir entièrement le robot, que tout soit correctement pensé, plutôt que de faire certains éléments comme le châssis avec ce qui est disponible sous la main. Cette fois ci, chaque élément du robot aura été pensé. Dans ce billet, je vous propose une rapide présentation de ce robot et de ses objectifs.
J’ai créé une page pour le projet R.Hasika, que je vous invite à consulter pour davantage de détails.
Motorisation et déplacement

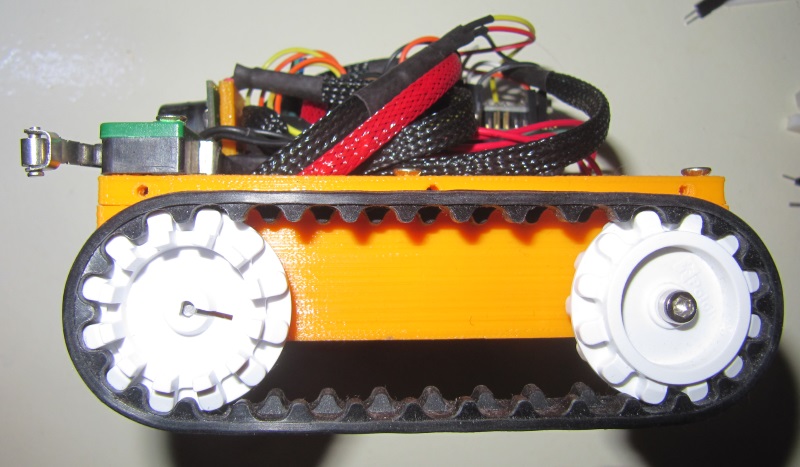
moteurs de R.Hasika sans les capteurs de rotation
R.Hasika est un robot à conduite différentielle, s’appuyant sur deux moteurs à courant continu. Ces moteurs sont dotés de capteurs de rotation qui permettront un déplacement précis. Ils sont contrôlés par une puce DRV8835, qui permet de les commander facilement en PWM avec seulement 4 GPIO.
Ces moteurs entraînent deux chenilles, mais on peut les remplacer par des roues si on le souhaite. Dans tous les cas, ce choix de propulsion en fait un rover agile, capable de tourner sur lui même sur place, et avec une bonne capacité de franchissement d’obstacles.
Grâce aux capteurs de rotation des moteurs, on sera capable d’ajuster la vitesse de ceux ci pour effectuer des trajectoires parfaitement rectilignes, des rotations d’un angle précis, et même de l’odométrie et ainsi cartographier une zone.
Châssis et éléments structurels
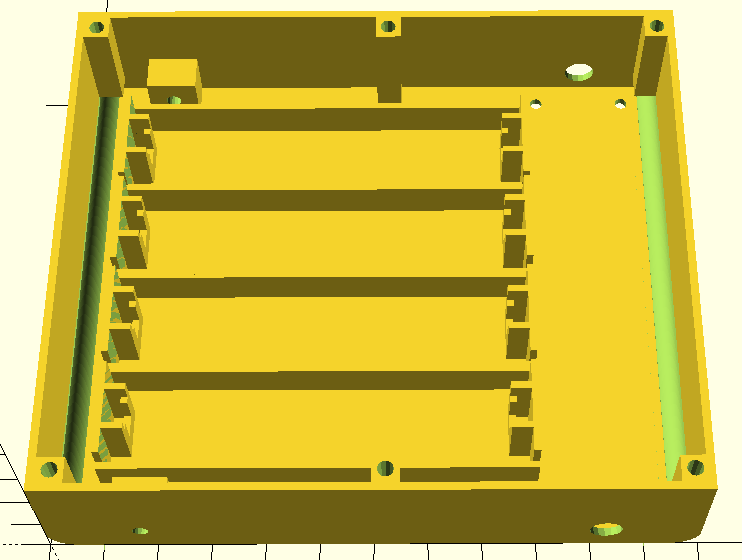
le châssis de R.Hasika dans Openscad
Par rapport à R.Cerda, cette fois, le châssis à été pensé à l’avance. En pratique, la conception a été faite entièrement avec le logiciel libre OpenScad, et le code source (libre) permet à tout un chacun de modifier les paramètres du robot pour l’ajuster à ses besoins. J’ai publié un article détaillé sur le châssis de R.Hasika sur ce blog, comportant plus de détails que la présentation que vous lisez en ce moment.
Le châssis a été pensé pour être fabriqué à l’imprimante 3D d’une seule pièce, avec tous les trous et emplacements de fixation requis pour l’assemblage d’un robot complet. Ce châssis comporte également l’emplacement des batteries, des moteurs, des roues libres et de la plaque de support de l’électronique.
Cette dernière justement est la seconde pièce, sur laquelle viennent se fixer les composants électroniques du robot, les capteurs, etc. Cette plaque se visse simplement sur le châssis, renforçant ainsi davantage sa solidité.
La troisième pièce est la carrosserie, qui vient se visser par dessus, et qui permet de protéger l’électronique, et sert de support à divers autres éléments (voir plus bas dans la section du même nom).
Alimentation électrique et autonomie
L’alimentation électrique se fait par le biais de batteries lithium (jusqu’à 4), qui fournissent une capacité de 50Wh, permettant ainsi au robot de dépasser les 24 heures d’autonomie hors déplacement. En déplacement on obtiendra facilement de nombreuses heures d’autonomie.
Un autre point intéressant avec ces batteries est qu’elles permettent d’intégrer au robot un circuit de charge, permettant de le recharger sans retirer les batteries. Mieux, on peut recharger le robot sans l’éteindre. Encore mieux, cela nous permet de programmer le robot pour qu’il aille se charger seul sur une station dédiée.




Capteurs
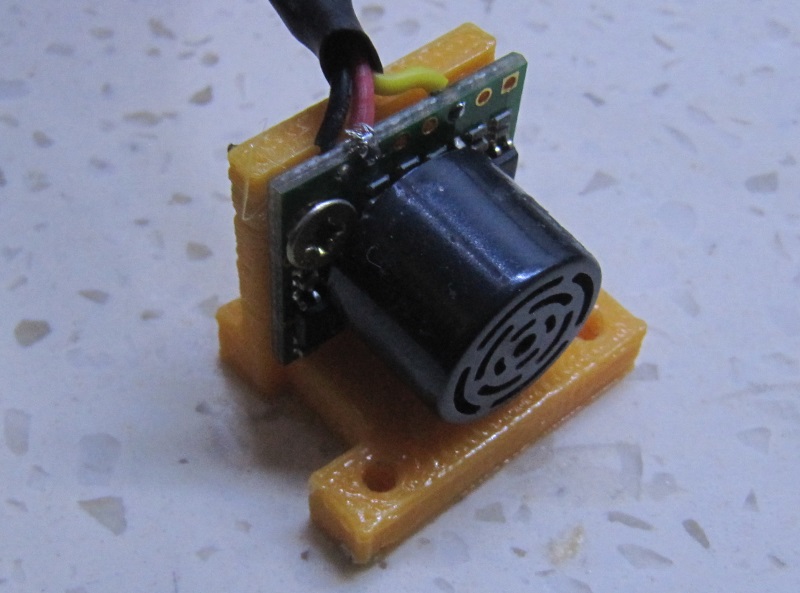
Capteur de distance ultrasonique Maxbotix
Les capteurs de base embarqués sont deux microswitches à levier, qui servent de capteurs de contact, un capteur de distance à ultrasons maxbotix, et les capteurs de rotation des roues. Si ces derniers permettent des trajectoires et mouvements précis, les deux premiers servent à mettre en oeuvre des algorithmes d’évitement d’obstacles.
D’autres capteurs viendront probablement s’ajouter à ces capteurs, avec par exemple un module accéléromètre, boussole et gyroscope 3D.
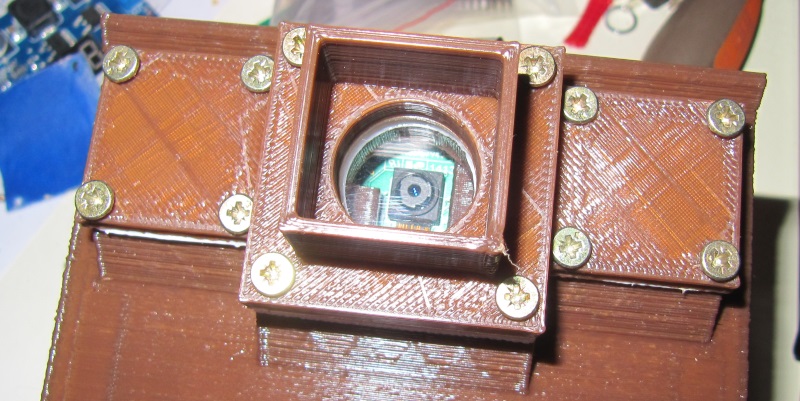
Un capteur particulier prendra place à coup sur, en revanche, avec le module caméra du Raspberry pi. Celui ci permet une capture vidéo en fullHD (1920*1080) à 30 images par secondes et des photos à 5Mpixels, voire 8 pour la nouvelle version. Une version infrarouge existe également.
Electronique de commande
Pour l’électronique de commande de ce robot, on s’appuie tout d’abord sur un Arduino nano, chargé des tâches de bas niveau (commande des moteurs, lecture des capteurs, contrôle des LEDs et boutons, etc). Le robot peut être programmé directement via le Arduino, en ignorant le reste.

Le Arduino nano et le DRV8835 de R.hasika sur la plaque électronique. En dessous se trouve le Raspberry pi.
Mais cet Arduino est connecté par un port série à un Raspberry pi A+, qui permet cette fois de s’intéresser à des tâches plus complexes, telle que la cartographie, le traitement d’information vidéo, les communications wifi, etc. Si on ne souhaite pas s’occuper de la programmation des tâches de bas niveau, il suffit de téléverser le code fourni avec le projet sur l’Arduino et de communiquer avec celui ci depuis le Raspberry pi via un port série pour envoyer des commandes.
Autres éléments
R.Hasika embarque divers autres éléments que nous ne détaillerons pas tous ici. Mais en voici quelques uns :
- 6 leds RGB adressables, dont on peut définir indépendamment la couleur parmi 65536;
- un bouton poussoir programmable par l’utilisateur;
- du wifi embarqué, pour pouvoir commander ou programmer le robot à distance;
- un écran LCD 2*16 pour afficher des informations textuelles;
- une ouverture permettant au robot d’être modifié, adapté;
- des emplacements pour fixer des extensions non planifiées pour le moment.
Dans les prochains billets, nous nous pencherons en détail sur tous ces aspects, et nous nous intéresserons également aux objectifs recherchés pour ce robot, en commençant par détailler la conception du châssis et les fonctionnalités par celui ci. En attendant, voici une galerie de R.hasika :