Dans cet article, nous décrirons la conception du châssis de R.Hasika, un robot pensé pour être robuste, précis et autonome, présenté dans ce précédent billet, et dont voici la page de projet. Le châssis du robot est un élément important, puisqu’il lui conférera sa solidité, mais aussi une partie de ses capacités finales. En pratique, un bon châssis permettra un robot précis, du fait du positionnement exact des composants. Le châssis de R.Hasika présenté dans ce billet est un châssis monocoque, en une seule pièce, fait pour être construit à l’imprimante 3D. Détaillons maintenant sa conception et les fonctionnalités qu’il apporte.
You are browsing archives for
Étiquette : 3D
Caméra Raspberry pi waterproof : présentation.
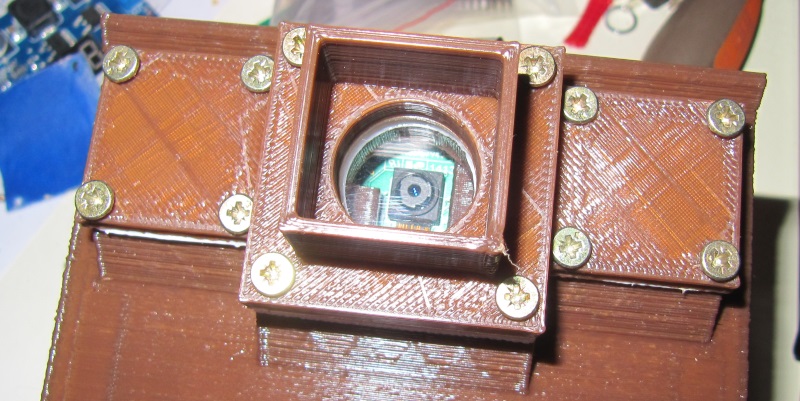
Dans le cadre de mon projet SauronPi, je développe une caméra autonome et waterproof capable de rester un moment dans la nature pour photographier ou filmer pendant de longues périodes sans intervention. Ceci est un sous-projet du projet SauronPi, pour lequel je développe des systèmes vidéo/photo basés sur le Raspberry Pi et son module caméra. L’objectif de ce billet est de vous présenter le projet et ses objectifs.
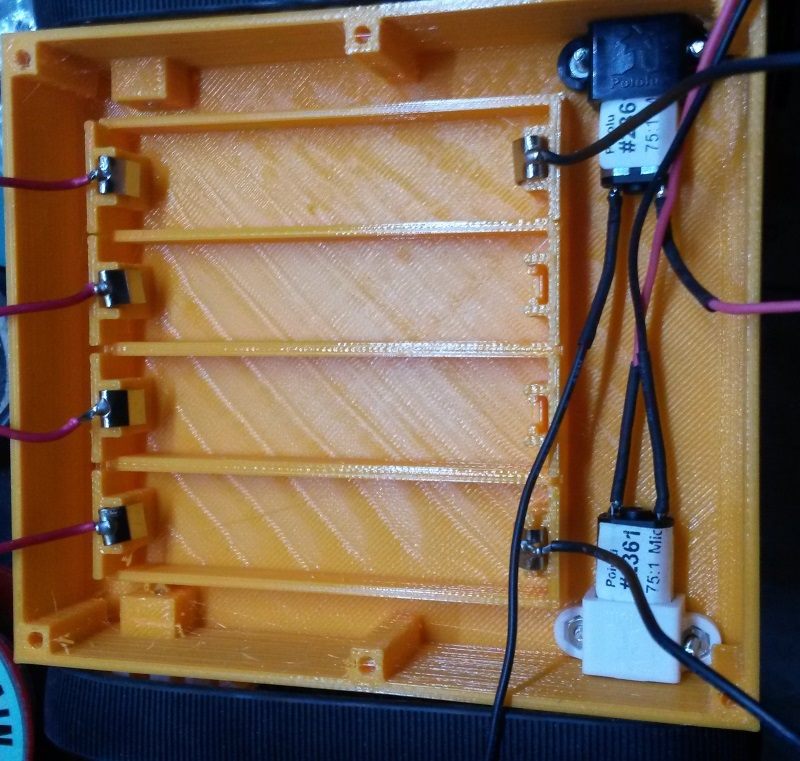
Création d’un boitier pour le panneau du contrôleur d’aquarium Rlieh
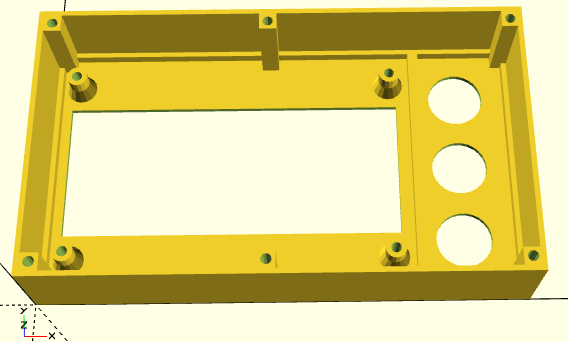
Pour mon contrôleur d’aquarium, Rlieh, j’utilise un écran LCD 4×20, connecté à un Arduino nano, et des sondes diverses. Pour l’instant, je n’ai qu’un bouton, pour allumer et éteindre le tout, mais j’en prévois d’autres. Jusqu’ici, l’ensemble était simplement vissé sauvagement, et la carte électronique posée sur la vitre qui protège les LED. Du coup, il est temps de reprendre tout ça pour tout installer proprement!