A quel point un robot peut il être simple à concevoir? Il y a un moment (en 2013), je me suis demandé à quoi ressemblerait le robot le plus simple que je pourrais fabriquer. Je vous propose de découvrir dans ce billet le résultat.
You are browsing archives for
Année : 2015
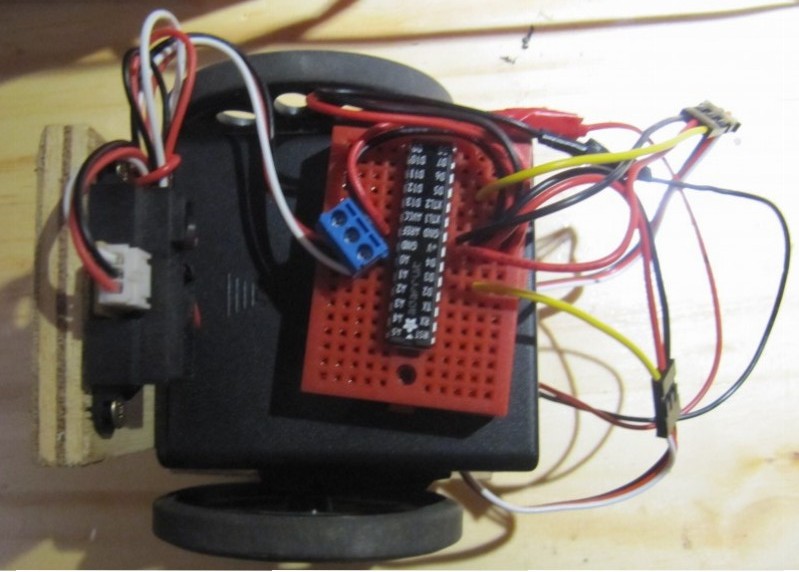
R.Eikki : Construction du mini robot basse consommation
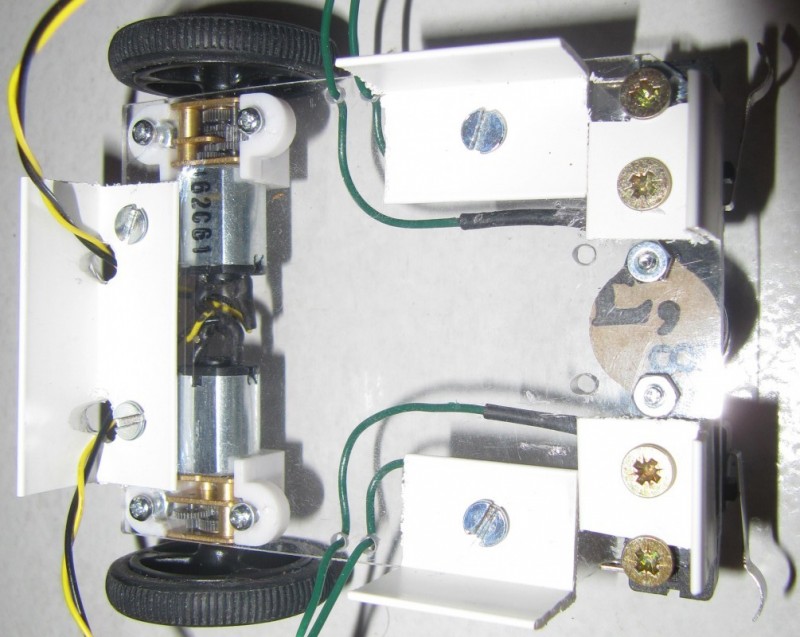
R.Eikki est un robot pensé pour être économe en énergie et donc avoir une grande autonomie.
Les robots peuvent être plus ou moins gros, complexes, voir puissants. Mais pour ce projet, nous nous intéressons à l’autonomie. L’objectif du prototype R.Eikki est de concevoir un robot ayant la plus grande autonomie possible, tout en restant compact. On ne cherchera donc pas à mettre des tonnes de batteries, mais plutôt pour un matériel donné, à optimiser la consommation au maximum pour en tirer la plus longue durée de fonctionnement possible sur une charge de batterie.
j’ai discuté ce sujet en profondeur sur le forum robot-maker. Cliquez ci dessous pour voir la galerie sur ce robot.
Conception d’un système d’éclairage automatisé, décentralisé et ergonomique
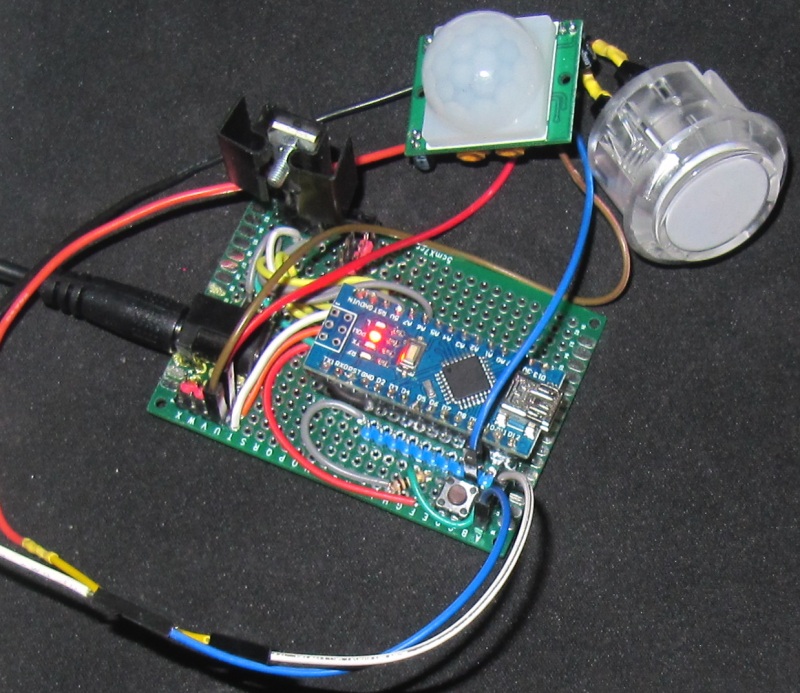

contrôleur d’éclairage vu de dessus

contrôleur d’éclairage vu de dessus
Les éclairages d’une habitation sont souvent contrôlés de façon binaire : allumés ou éteints. Avec des lampes fluocompactes ou encore des ampoules à filament, cela peut se justifier pour diverses raisons. Toutefois, grâce à l’électronique programmable du genre des Arduino, il est possible de faire mieux, tout en utilisant des technologies plus modernes telles que les LED pour faire quelquechose de plus sophistiqué, tout en restant simple.
L’objectif de ce projet est triple :
- permettre un contrôle décentralisé de l’éclairage (on est pas limités au seul interrupteur mural);
- automatiser la gestion de l’éclairage (allumage et extinction quand nécessaire), en laissant toutefois un contrôle total à l’utilisateur;
- affiner le contrôle qu’a l’utilisateur sur les sources d’éclairage ainsi que l’ergonomie de celles ci (intensité, allumage progressif, etc).
Nous verrons ici comment atteindre ces objectifs et développer un système économique, peu gourmand en énergie, facile à utiliser tout en étant adaptable et sophistiqué.
Configuration de l’I2C sur un Raspberry Pi
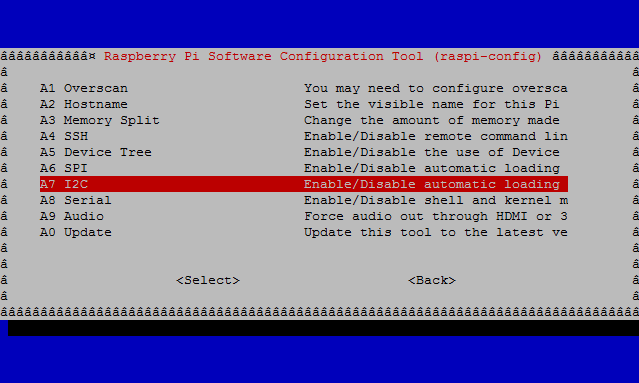
Nouveau tutoriel : Configuration de l’I2C sur un Raspberry Pi.
Le bus I2C (ou I²C), pour Inter Integrated Circuit, a été développé en 1982 par Philips et permet de connecter divers équipements électroniques entre eux. Il dispose d’un système d’adressage permettant de connecter de nombreux périphériques I2C sur les mêmes câbles, ce qui signifie ici que l’on utilisera un nombre restreint de GPIO, quel que soit le nombre de périphériques I2C installés. Dans le contexte du Raspberry Pi, ce bus est très utile, puisqu’il permet de rajouter diverses fonctionnalités. On trouvera par exemple des puces pour ajouter des GPIO, des horloges temps réel, des capteurs, et bien d’autres composants en I2C. Par défaut, l’I2C n’est pas forcément activé, et nous verrons comment faire cela.
Pour lire la suite du tutoriel, suivez ce lien :
Installation et utilisation du module camera du Raspberry Pi
Un nouveau tutoriel est en ligne, sur l’installation et la configuration du module camera sur un Raspberry Pi.
Il est disponible sur le Wiki, dans la section raspberry pi.
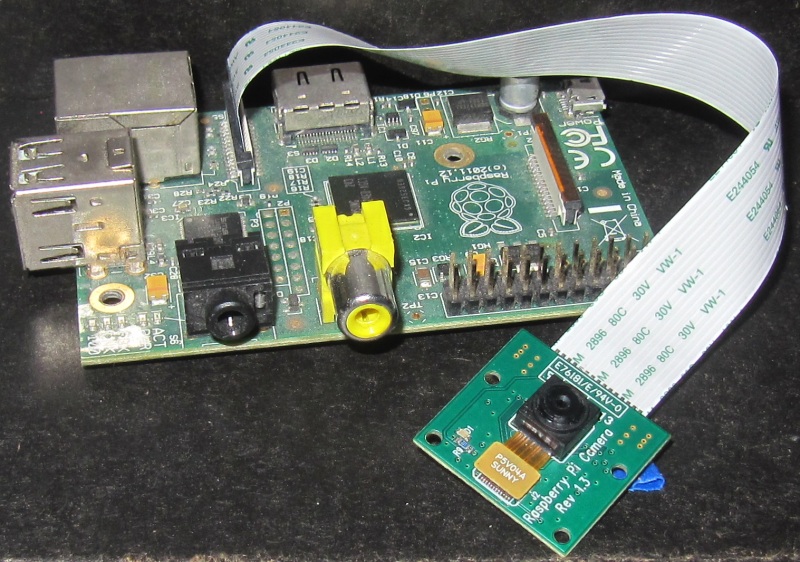
Le module camera coûte environ 25$, et est capable de capturer des images en 5 méga-pixels, mais également des vidéos jusqu’à la full HD à 30 images par secondes. Il se branche dans un port spécial du Raspberry pi, qui permet au GPU de traiter directement les données.
Dans ce tutoriel, nous verrons comment brancher le module caméra, l’activer, et l’utiliser.
Lien vers le tutoriel : http://nagashur.com/wiki/doku.php?id=raspberry_pi:module_camera_install
Liste de tutoriels Raspberry pi sur le wiki
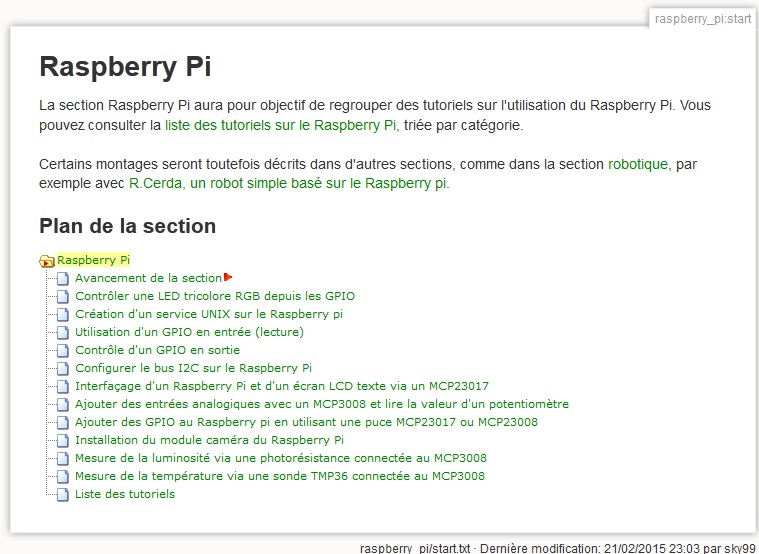
J’ai commencé à porter les tutoriels Raspberry Pi sur le wiki. Je remets donc en forme, corrige, actualise et améliore les anciens tutoriels, tout en ajoutant de nouvelles ressources. Si vous êtes donc intéressés par le Raspberry Pi, et vous demandez comment réaliser une chose en particulier, n’hésitez pas à vous rendre dans la section Raspberry pi du wiki (http://nagashur.com/wiki/doku.php?id=raspberry_pi:start).
Pour l’instant voici la liste de tutoriels Raspberry pi postés :
- Contrôler des GPIO en sortie;
- Contrôler des GPIO en entrée (lecture);
- Gérer une LED RGB via les GPIO du Raspberry Pi;
- Ajouter des entrées analogiques au Raspberry Pi via un MCP3008, et lire la valeur d’un potentiomètre;
- Ajouter des GPIO supplémentaires au Raspberry Pi via une puce MCP23008 ou MCP23017;
- Mesurer la luminosité ambiante via une photorésistance en utilisant le MCP3008;
- Mesurer la température via la sonde analogique TMP36 et un MCP3008;
- Ajouter un écran texte au Raspberry Pi via un MCP23017/MCP23008;
- Créer un service UNIX sur le Raspberry pi.
Au passage, dans la section Robotique du Wiki, j’ai porté les tutoriels sur la création d’un robot basé sur le Raspberry Pi, R.Cerda.
Un nouveau robot basé sur le Raspberry Pi : R.Hasika
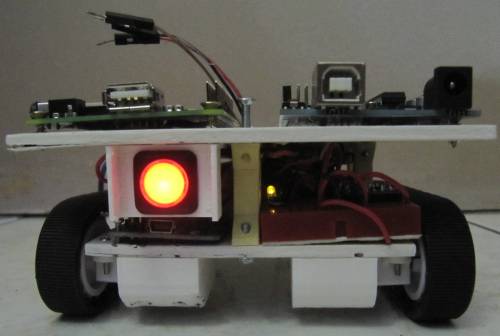
J’ai commencé la construction d’un nouveau robot basé sur le Raspberry pi, R.Hasika.
Celui ci reprend les bases du précédent, R.Cerda, mais en améliorant l’ensemble avec une conception plus précise. L’objectif de ce robot est de pouvoir obtenir un déplacement rectiligne et précis, et des rotations exactes. Ainsi, il devrait être possible de mesurer le déplacement du robot, et de calculer sa position en fonction des déplacements effectués par rapport au point de départ.
L’un des objectifs est de pouvoir faire en sorte que R.Hasika soit capable de se déplacer dans un environnement pour accomplir une mission quelconque, puis de revenir à un point précis afin de pouvoir se recharger automatiquement.
La conception de ce robot est ouverte, je fournis donc les plans et fichiers permettant de reproduire exactement le même robot, ainsi que les scripts permettant d’en modifier certains paramètres (largeur, hauteur, etc).
Pour plus d’informations, les fichiers, des explications, les plans, scripts et codes sources, rendez vous sur la page centrale du projet R.Hasika (http://nagashur.com/wiki/doku.php?id=robotique:r_hasika:start).
Pour voir l’avancement du projet, rendez vous sur la page d’avancement de R.Hasika (http://nagashur.com/wiki/doku.php?id=robotique:r_hasika:avancement).
Ouverture d’un Wiki
Bonjour à tous.
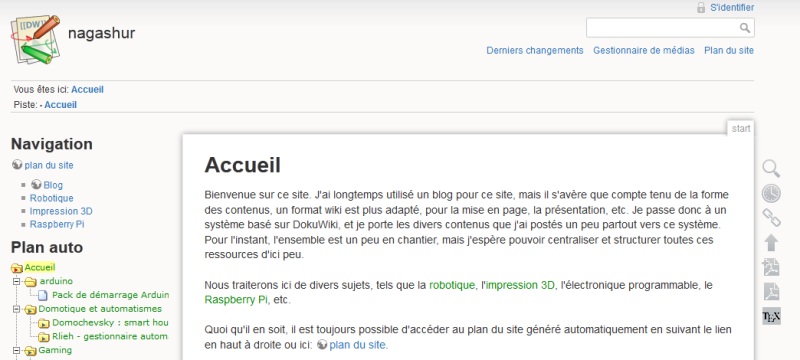
Pour des raisons pratiques, j’ai décidé d’installer un wiki sur ce site, accessible via l’url suivante :
http://www.nagashur.com/wiki, et via http://wiki.nagashur.com. Du fait du type de billets que je postais ici, le wiki est plus adapté pour les options de mise en page et également la gestion des ressources, des liens être les pages, etc.
Je continuerai à poster des articles sur ce blog, mais je me servirai également du wiki pour mettre en forme des articles combinant des ensembles de billets postés sur ce blog. Le format sera également plus adapté à une consultation hors ligne, avec la possibilité de télécharger des versions PDF des articles.
Je continuerai
Rendez vous sur le wiki (déjà fourni!) pour plus de contenu 😉