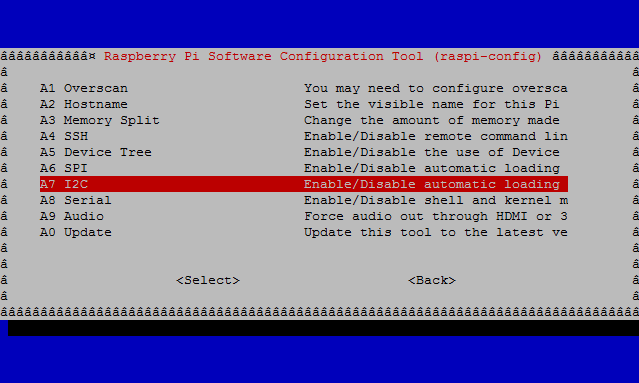
Nouveau tutoriel : Configuration de l’I2C sur un Raspberry Pi.
Le bus I2C (ou I²C), pour Inter Integrated Circuit, a été développé en 1982 par Philips et permet de connecter divers équipements électroniques entre eux. Il dispose d’un système d’adressage permettant de connecter de nombreux périphériques I2C sur les mêmes câbles, ce qui signifie ici que l’on utilisera un nombre restreint de GPIO, quel que soit le nombre de périphériques I2C installés. Dans le contexte du Raspberry Pi, ce bus est très utile, puisqu’il permet de rajouter diverses fonctionnalités. On trouvera par exemple des puces pour ajouter des GPIO, des horloges temps réel, des capteurs, et bien d’autres composants en I2C. Par défaut, l’I2C n’est pas forcément activé, et nous verrons comment faire cela.
Pour lire la suite du tutoriel, suivez ce lien :