
Dans le cadre du programme REA, nous développons un rover. Nous avons tout d’abord décidé du mode de déplacement du robot, avant de nous pencher sur le type de moteurs à utiliser, puis au choix des roues ou chenilles pour la propulsion. Nous disposons maintenant d’un groupe moto-propulseur, qu’il convient de s’intéresser au contrôle des moteurs pour gérer précisément les déplacements du rover. Nous nous pencherons maintenant sur cette problématique.
You are browsing archives for
Étiquette : pololu
Raspberry pi mobile LiPo : un système autonome et rechargeable à bonne autonomie
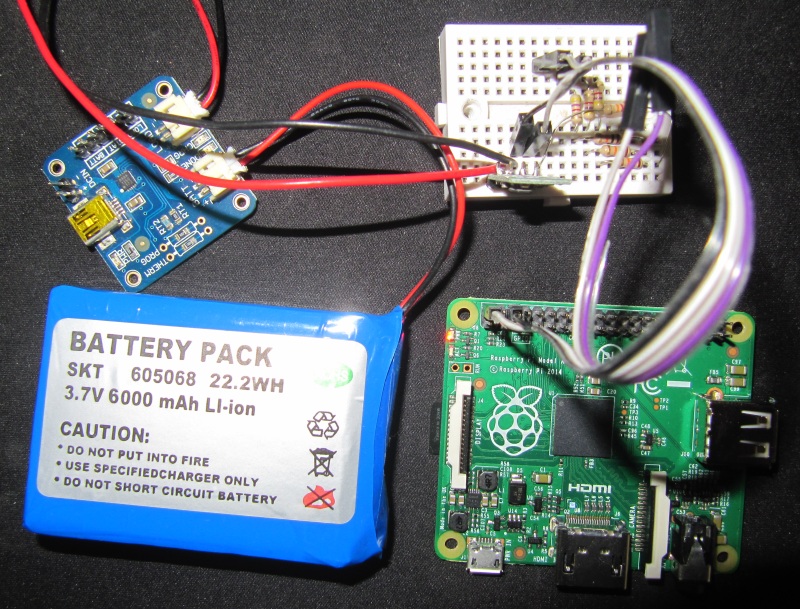
Le Raspberry pi est un ordinateur compact et économe en énergie. Il est donc logiquement une solution intéressante pour des projets embarqués. Je vais donc présenter ici un montage permettant de faire un Raspberry pi portable avec une batterie rechargeable Lithium Polymère, et un chargeur efficace. L’objectif final sera d’avoir un système qu’on puisse utiliser indifféremment sur secteur ou sur batterie, sans interruption, comme avec un ordinateur portable classique.