
Dans le cadre du programme REA, nous développons un rover. Nous avons tout d’abord décidé du mode de déplacement du robot, avant de nous pencher sur le type de moteurs à utiliser, puis au choix des roues ou chenilles pour la propulsion. Nous disposons maintenant d’un groupe moto-propulseur, qu’il convient de s’intéresser au contrôle des moteurs pour gérer précisément les déplacements du rover. Nous nous pencherons maintenant sur cette problématique.
You are browsing archives for
Mois : février 2016
REA – energie, alimentation électrique : batteries pour rover
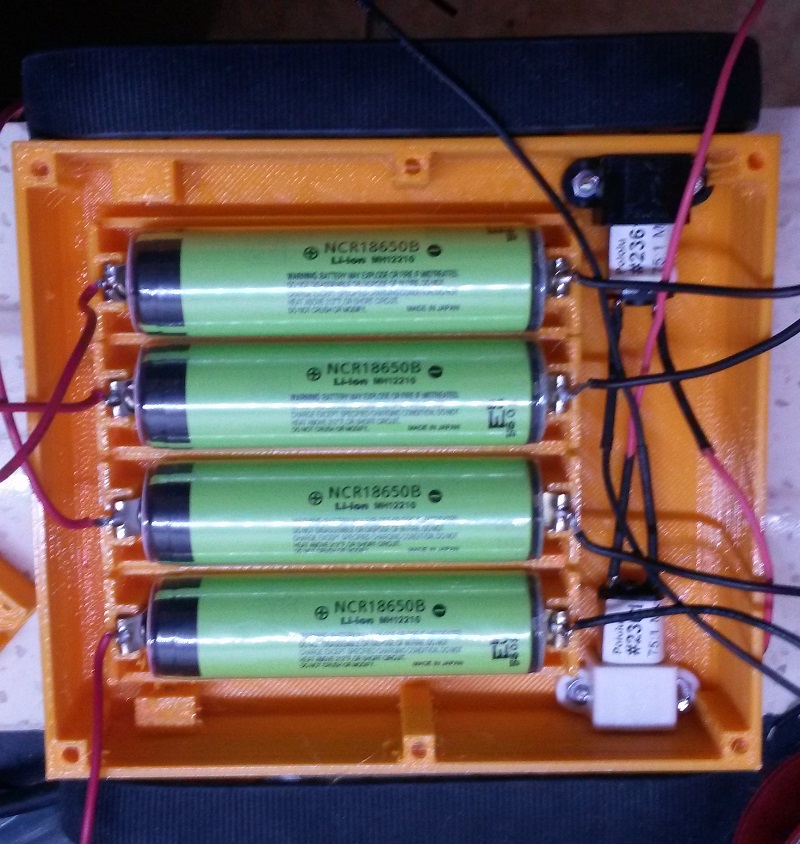
Dans le cadre du programme REA, nous développons un rover. Nous avons tout d’abord décidé du mode de déplacement du robot, avant de nous pencher sur le type de moteurs à utiliser, puis au choix des roues ou chenilles pour la propulsion. Pour que notre rover soit autonome, il nous faut une source d’énergie, et comme nous avons opté pour des moteurs électriques, il nous faut une alimentation électrique pour l’ensemble. Voyons cette problématique en nous penchant principalement sur les batteries pour rover.