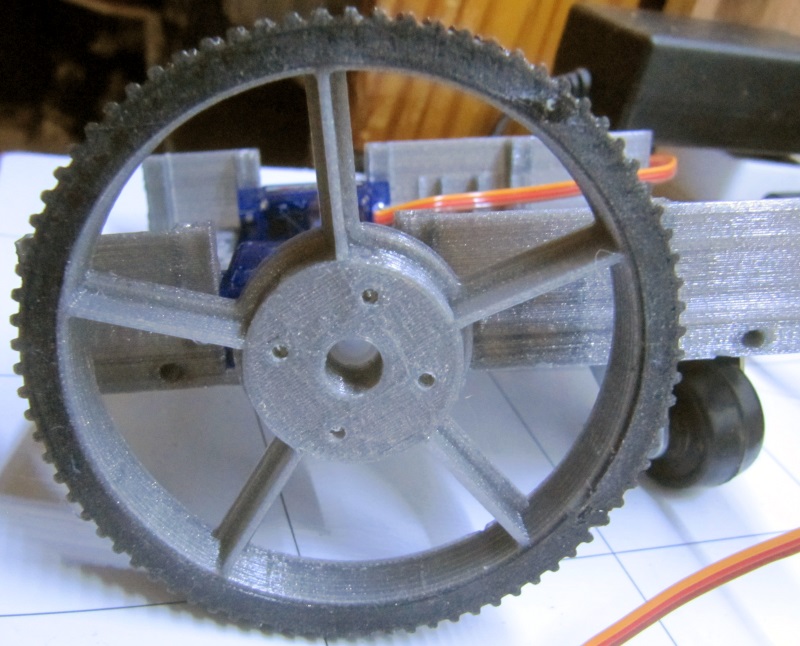
Dans la version actuelle de R.Ian, j’ai décidé d’utiliser des servomoteurs à rotation continue. En effet, pour faire un robot, il est difficile de faire plus simple en matière d’assemblage, puisque chaque servomoteur utilisera un fil pour l’accès au +5V, un second pour la masse, et un troisième connecté à un GPIO. Cela signifie que pour les deux moteurs, on utilise seulement deux GPIO, et que l’assemblage est très simple, ce qui est l’un des objectifs du robot. Il nous faut maintenant des roues adaptées. Puisque nous cherchons à réduire les coûts, une solution est de les fabriquer, ce qui nous permettra également de les ajuster précisément à nos contraintes. Détaillons maintenant tout cela.
You are browsing archives for