R.Eikki est un robot pensé pour être économe en énergie et donc avoir une grande autonomie.
Les robots peuvent être plus ou moins gros, complexes, voir puissants. Mais pour ce projet, nous nous intéressons à l’autonomie. L’objectif du prototype R.Eikki est de concevoir un robot ayant la plus grande autonomie possible, tout en restant compact. On ne cherchera donc pas à mettre des tonnes de batteries, mais plutôt pour un matériel donné, à optimiser la consommation au maximum pour en tirer la plus longue durée de fonctionnement possible sur une charge de batterie.
j’ai discuté ce sujet en profondeur sur le forum robot-maker. Cliquez ci dessous pour voir la galerie sur ce robot.
-

- Installation du berceau arrière
-
- châssis du robot, en styroglass 2mm.
-

- moteurs et roues
-

- Le routage des câbles des moteurs d’un mini robot basse consommation
-

- batterie lithium ion de 2000mAh utilisée, avec le chargeur USB Adafruit..
-

- La roulette avant est fixée sur le châssis
-

- installation des détecteurs de contact et du berceau avant.
-

- routage des câbles des détecteurs de contact.
-

- les berceaux latéraux sont retenus par une vis et un écrou.
-

- Ajout des moteurs/roues au châssis
-

- mise en place de la batterie
-
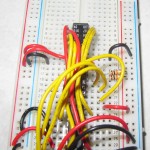
- La breadboard du circuit de commande
-
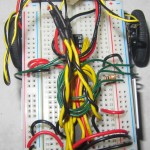
- Tous les éléments sont en place
-
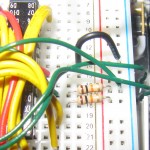
- gros plan sur les résistances de tirage des détecteurs de contact
Aucun commentaire jusqu'à présent.