R.Ian est un robot simple à fabriquer, extensible et économique. C’est en tous cas l’objectif dans la conception de ce robot. Comment s’assurer de tout cela? Je vais vous présenter dans ce billet mes solutions pour répondre à ces problèmes.
Simplicité de fabrication
Par le passé, j’ai conçu des robots qui requerraient de nombreuses pièces, et un assemblage précis, en faisant les trous au bon endroit sous peine d’obtenir des éléments incorrectement alignés, des roues de travers, etc. Afin d’éviter cela, j’ai décidé cette fois ci de réduire autant que possible le nombre de pièces, en créant un chassis mono-pièce. L’idée est la suivante : le chassis est fait d’une seule pièce, sur laquelle tous les éléments constitutifs viennent se fixer, et les fixations sont déjà présentes pour cela. Dans cette optique, j’ai conçu le châssis de R.Ian en utilisant OpenSCAD, un utilitaire de conception 3D libre, puissant et multi-plateformes. Grace aux fonctionnalités de ce logiciel, j’ai pu réaliser un châssis paramétrique, et facilement ajustable par l’utilisateur. Cela signifie en pratique que vous pouvez télécharger les fichiers nécessaires sur le GitHub du projet R.Ian, les ouvrir avec OpenSCAD, et modifier les variables (par exemple la taille du châssis, le rayon des roues, etc) pour changer ce que vous voulez. Il n’est pas nécessaire pour cela de savoir programmer, puisque j’ai déjà fait le travail; il suffit en effet de regarder les noms des variables et les commentaires (au début du code), et de modifier les valeurs. Vous pouvez alors appuyer sur F5 pour générer un rendu, et voir les changements. Voici un aperçu :
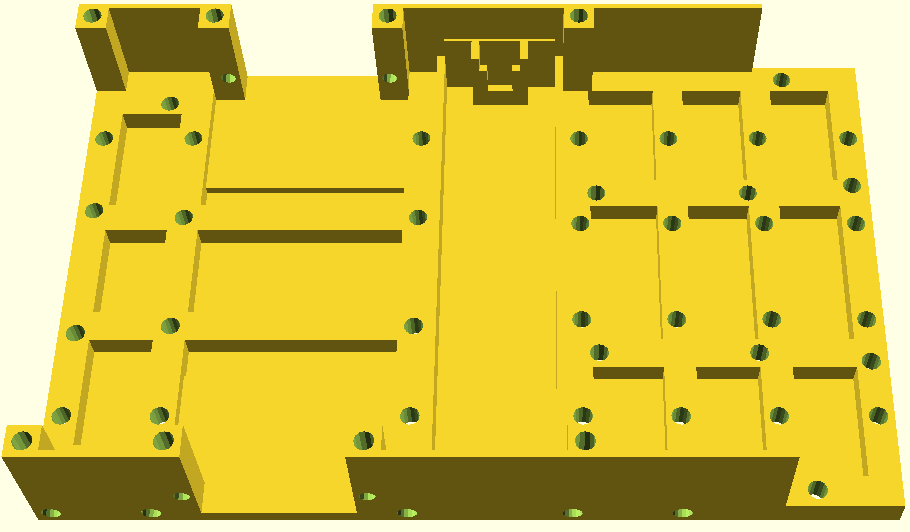
R.Ian – chassis conçu dans OpenSCAD
Vous pouvez également télécharger les fichiers STL déjà générés pour vous en servir pour fabriquer les pièces (nous reviendrons sur cet aspect des choses).
En pratique, sur l’image que vous voyez au dessus, on a le châssis mono-pièce. Les moteurs viennent se fixer dessus, la roulette avant, ainsi que la batterie, les capteurs de contacts, et même un servomoteur pour tourner le capteur de distance. Lorsque tous ces éléments sont assemblés, il ne reste plus qu’à installer une plaque sur laquelle se fixe le Arduino qui contrôle le tout (et/ou le Raspberry pi zero, selon vos choix).
Ainsi, l’avantage, c’est qu’on a une pièce sur laquelle tout le reste vient se visser. Cette pièce est l’ossature du robot, et assure sa solidité, le positionnement optimal des éléments, et de nombreuses autres fonctions. Chaque élément est positionné précisément, le tout est calculé pour bien s’emboîter. Si vous changez les dimensions du robot, par exemple en allongeant celui ci, alors tout sera recalculé automatiquement.
Il s’agit en pratique d’une pièce complexe, que je vois mal quelqu’un fabriquer à la main. Mais ce n’est pas grave, car elle a été pensée pour l’impression 3D!
Ainsi, c’est l’imprimante 3D qui sera responsable de la précision du placement des éléments, et elle fait tout cela au dixième de millimètre près!
Voici en pratique ce que cela donne lorsque l’on imprime cette pièce :
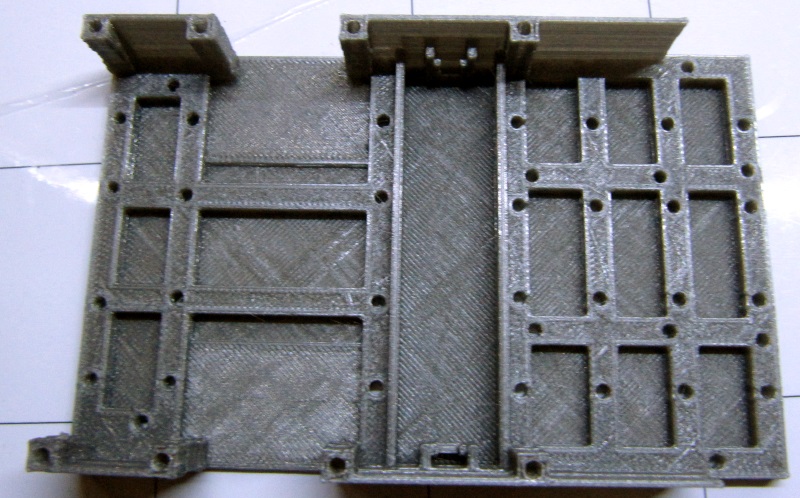
châssis de R.Ian en PLA gris. Il s’agit de la version à servomoteurs.
Pour l’utilisateur voulant fabriquer ce robot, il suffit donc de trouver une imprimante 3D, un fablab/hackerspace en possédant une, ou encore un service en ligne d’impression qui lui enverra la pièce finie. Si vous optez pour la dernière solution, pas de problème, puisque les fichiers STL qui sont sur le Github sont des fichiers que j’ai imprimés, testés, corrigés. Ils sont faciles à imprimer même sur les imprimantes les plus basiques (je les ai conçus pour cela)! Vous pouvez donc directement les télécharger pour les ouvrir avec le logiciel associé à votre imprimante 3D. Pour ma part, j’ai tout imprimé avec Cura (un autre logiciel libre 😉 )
Il ne s’agit donc peut être pas du châssis le plus léger que je pouvais créer, ou le plus solide possible, mais d’un châssis équilibré, à la fois léger, solide, et facile à fabriquer.
Extensibilité
De par sa conception, le robot possède d’office de nombreux trous de fixation permettant de rajouter des éléments. D’autre part, il est fait pour qu’on puisse ajouter des couches les unes sur les autres. Par exemple, pour ajouter un Raspberry pi, il suffira d’imprimer un support, qui se fixera au dessus du circuit électronique actuel. On peut donc rajouter une quantité importante de capteurs ou de composants divers.
Des trous sont aussi présents sur les côtés pour ajouter des pièces encore non définies, il reste aussi de la place à l’arrière et à l’avant pour cela.
En outre, n’oublions pas que ce robot est fait sous licence libre, et tous les codes sont accessibles. De ce fait, il est possible de modifier le moindre élément pour rajouter des choses, en enlever ou e modifier. Les fichiers scad sont fournis, donc le robot est TOTALEMENT modifiable.
Faible coût du robot
L’objectif est non pas de faire le robot le moins cher possible (on finirait sans doute avec quelque chose de peu exploitable), mais de faire un robot qui coûte moins de 50€, tout compris. En pratique, la version de base revient à environ 35€, et on peut baisser encore le coût si l’on supprime certains éléments (tout en conservant la possibilité de les rajouter plus tard, les emplacements sont là!).
Pour remplir cet objectif, j’ai effectué une sélection très précise des éléments constitutifs du robot. D’autre part, j’ai réalisé autant d’éléments que possible pour l’impression 3D, car on peut les fabriquer pour moins cher que les éléments du commerce, sans compter le fait qu’on peut les adapter précisément. Pour les éléments achetés, je me suis fourni autant que possible sur Aliexpress, ou l’on trouve des pièces de qualité à bas prix, avec des frais de port gratuits. Encore une fois, tous les éléments dont je parle sont des éléments que j’ai testés avant de les approuver pour ce robot.
Dans le billet suivant, nous nous intéressons aux moteurs et à la construction des roues et des pneus, tous deux imprimés en 3D.
On attend avec impatience la suite 🙂
Hello, merci, c’est en cours de rédaction 🙂