SauronPi est un projet de longue date, à qui j’ai récemment donné ce nom. L’objectif de ce projet, également documenté en anglais sur Hackaday.io, est de créer un système de caméra autonome capable d’enregistrer de la vidéo ou des photographies. Pour ce projet, j’ai plusieurs objectifs, qui constituent autant de sous-projets. Toutefois, une bonne partie des développements est commune, aussi le tout est il regroupé sous ce projet. Les objectifs principaux sont les suivants :
- créer une caméra réseau motorisée HD pour un prix raisonnable;
- créer une caméra capable de fonctionner sur batterie, dans la nature, voire avec des panneaux solaires;
- créer une caméra motorisée silencieuse a forte capacité de stockage pour faire de la capture d’événements (thèses, conférences, etc)
La partie sur laquelle je travaille le plus ces temps ci est la partie caméra nature. En effet, un ami biologiste observe les baleines, et cherche un système à déployer pour prendre de nombreuses photos de celles ci. Pour ma part, je cherchais un moyen de tester l’ensemble! Du coup, cet aspect est en développement actif ces temps ci.
SauronPi version nature
Je me base sur un Raspberry pi A+ avec le module caméra officiel (FullHD à 30 FPS en vidéo, 5Mpixels en photo) accompagné de batteries lithium et d’un régulateur de tension, et d’un module wifi pour la connectivité. J’ai décrit cet ensemble dans un précédent billet, et par la suite testé l’autonomie obtenue avec une batterie de 6Ah, atteignant 40 heures en veille.
J’ai commencé par une version utilisant une boite de dérivation et une plaque réalisée à l’imprimante 3D pour tenir l’ensemble en place :

SauronPi version boite de dérivation
Cette version est tout à fait utilisable, et les fichiers restent disponibles sur le github du projet SauronPi. Cependant, j’ai décidé de créer également un boitier qui peut être fabriqué à l’imprimante 3D afin d’adapter davantage l’ensemble à mes besoins. Le boitier a donc été conçu avec OpenScad, et le fichier scad source est d’ailleurs disponible pour modification (cliquez sur raw pour le télécharger, il vous faudra aussi les fichiers waterproofbox.scad et lipoBattHolder.scad). Celui ci est donc paramétrique, ajustable. On peut modifier les dimensions, l’épaisseur des parois, le nombre et la taille des ouvertures, et de nombreux paramètres. Tout ceci permet par de changer le nombre de boutons qu’on peut installer, pour avoir plus ou moins de fonctions accessibles rapidement. Je détaillerai cet aspect paramétrique dans un billet ultérieur. Pour le développement de l’ensemble, j’ai activé toutes les ouvertures possibles. J’ai imprimé l’ensemble en marron, afin d’avoir une couleur discrète, car ce système sera aussi utilisé pour des oiseaux. Voici le résultat :


A l’arrière il y a trois boutons poussoirs, et la place pour 3 autres (les plaques avec des vis peuvent être enlevées), tandis qu’à l’avant il y a l’ouverture de la caméra, avec une jupe pare-soleil, et un plexiglas pour protéger l’électronique de l’eau ou de l’humidité. Les deux plaques peuvent être enlevée pour ajouter un éclairage frontal.
Le tout a été imprimé en PLA, et les joints ont été imprimés avec un matériau souple, le ninjaflex. Un billet détaillera davantage la technique de création des ouvertures refermables de façon résistante à l’eau.
A l’intérieur, on a la place pour jusqu’à 3 batteries lipo de type 18650B (quand on élargit la boite, on a automatiquement davantage de batteries, mais c’est également réglable):
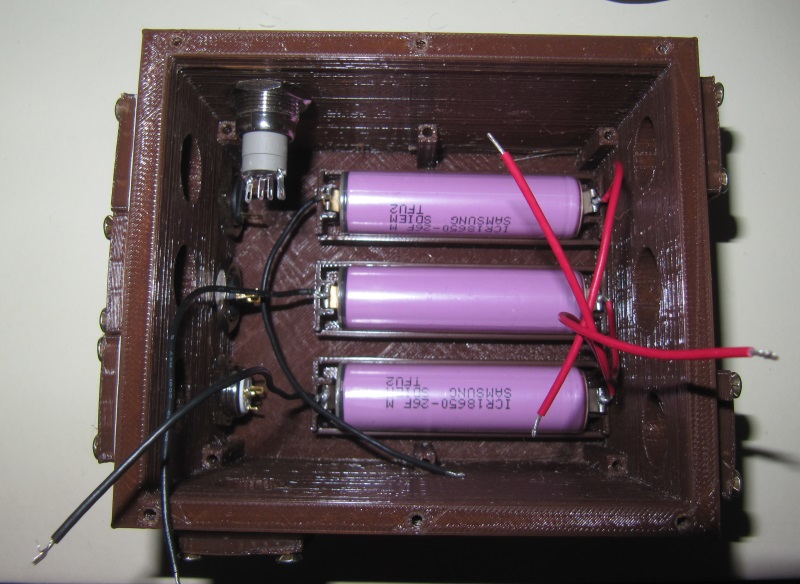
SauronPi : compartiment batteries avec batteries installées
Au dessus des batteries vient se placer une plaque qui porte le Raspberry pi, le module camera et l’électronique de l’ensemble. Le boitier se referme alors avec un couvercle et un joint d’étanchéité également imprimés en 3D. Les boutons à l’arrière servent à lancer des commandes (photo, vidéo, timelapse), tandis qu’un bouton permet d’allumer ou d’éteindre l’ensemble.
Deux batteries 18650B permettent déjà de surpasser la capacité du précédent prototype (7.2Ah, contre 6.6), et avec 3 on monte à 10.2Ah, ce qui nous amènerait à 60h d’autonomie en veille.
Par la suite, l’une des ouvertures servira de passe-câbles pour une alimentation par panneaux solaires afin de recharger les batteries et ainsi avoir une autonomie pratique de plusieurs mois, voir années (jusqu’à l’usure des batteries, en fait, après 300 à 1000 cycles de charge-décharge)
Voici une vidéo du premier test d’aspersion du boitier fini et assemblé :
[…] le cadre de mon projet SauronPi, je développe une caméra autonome et waterproof capable de rester un moment dans la nature pour […]
Intéressant ta réalisation, je suis moi-même en train de développer un peu le même système avec une batterie au plomb pour avoir une autonomie de plusieurs jours.
Par contre comparé à toi j’ai une led IR qui consomme pas mal pour la nuit, c’est pour des chouettes hulottes.
J’ai aussi géré la batterie avec une mesure de la tension, un comparateur et un GPIO du Rpi, je n’ai pas voulu utiliser une entrée analogique pour limiter les script et donc la consommation du système.
J’y ai intégré un module RTC, gestion du OFF par bouton via GPIO et script, un bouton power principale pour couper complètement le système et ai pris une led depuis les GPIO pour pouvoir savoir quand le Raspberry pi est allumé ou éteint.
Je tourne à moins de 200mA avec une led IR, camera V2 , Rpi A+, il me reste à désactiver les leds qui consomment pour rien…
Si cela t’intéresse je peux te fournir quelques photos du système.
J’ai déjà quelques améliorations en vue que je vais faire dans peu de temps…
117hlx
mix4i2
9pp8q2
0jo8l0
v72fdb
rtgdyq
ehb9qw
ob06ze
otj7ze
qwifo4
93rs2k
dksojt
p33cs9
lb2gt8
2nt2bm
d4cs3z
htdw5u
czizwj
ykcqdn
jncxtf
fhy6rx
xe3um3
emtp7a
pp49dp
h601xm
3xlh4m
hm1cdd
50atfl
8ruf9w
ky9vv7
g9qka0
qknjxk
ridv38
ra1ab2
339130
1qv7wu
qzrnpm
d6clae
9svj1d
i9d28s
av8kid
h95agl
ubuggs
xk4svs
9spim8
pfd1lp
uilq3v
62vfve
mh01vd
089ntl
vg89dp
mntes4
jgerxd
kdykdv
hxxyqx
8rgj1e
k2zkj5
ek54ed
49zmdu
w2in5t
5n53vn
7f25qe
5yeoy6
ns9g3k
t6yqji
ciskxu
3gcuyy
wubrzg
smpz42
a2wz28
o62b2p
j6k6ew
vxoyti
ksmo72
ucsif0
e0ciaq
16now1
zznyu3
z6mh4d
0vwkyd
twxhkq
o6ygig
wue7f8
ioi7nv
eatu0k