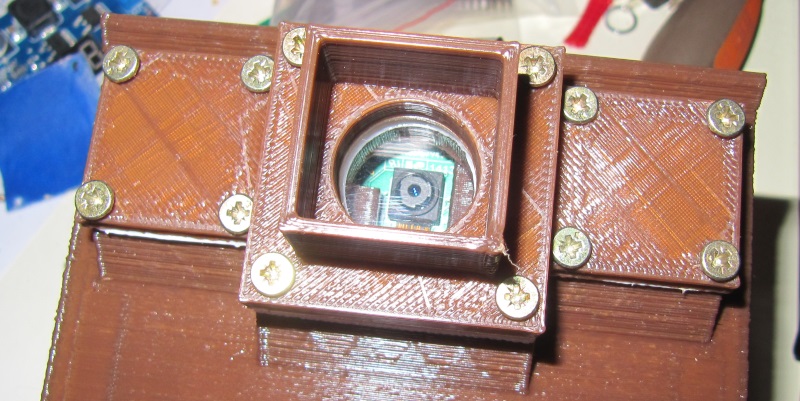
Dans le cadre de mon projet SauronPi, je développe une caméra autonome et waterproof capable de rester un moment dans la nature pour photographier ou filmer pendant de longues périodes sans intervention. Ceci est un sous-projet du projet SauronPi, pour lequel je développe des systèmes vidéo/photo basés sur le Raspberry Pi et son module caméra. L’objectif de ce billet est de vous présenter le projet et ses objectifs.
You are browsing archives for
Étiquette : autonome
REA – mode de propulsion du robot

Pour notre programme REA, nous développons un Rover d’Exploration Autonome.
Si nous souhaitons avoir un robot autonome qui ne soit pas une sonde immobile, il lui faut être capable de se déplacer. Nous nous intéressons ici aux robots terrestres, et nous pencherons sur les modes de déplacement utilisables pour nos robots. Nous verrons donc dans cet article chaque mode de propulsion utilisable simplement pour notre robot autonome, en expliquant leur fonctionnement, et en comparant leurs avantages et inconvénient. Le but de cette étude théorique est de dresser un panorama des solutions existantes afin de pouvoir choisir la plus adaptée à un problème donné.
Programme REA : Rover d’Exploration Autonome – introduction
J’ai construit divers robots “comme ça”, sans planifier grand chose, pour apprendre, comme R.Cerda,pour lequel j’ai fait un tuto, ou encore mon projet de robot à haute autonomie. Aujourd’hui, je me dis que je peux progresser de façon plus structurée, plus scientifique, un peu comme un programme de recherche (c’est mon métier après tout  ).
).
Je démarre donc mon programme REA, pour Rover d’Exploration Autonome. Le but est de faire un rover capable de se déplacer seul dans un environnement donné de façon autonome. J’ai déja réalisé certains des objectifs de ce programme dans quelques uns de mes projets précédents. Cependant, je souhaite pour ce projet tout reprendre depuis le début, et mener les évolutions comme un projet de recherche classique (en m’inspirant, sans bien sur prétendre approcher ce niveau, du programme MER –Mars Exploration Rover— de la NASA).
J’aborde ce projet sous deux axes :
- L’axe scientifique;
- L’axe pédagogique.
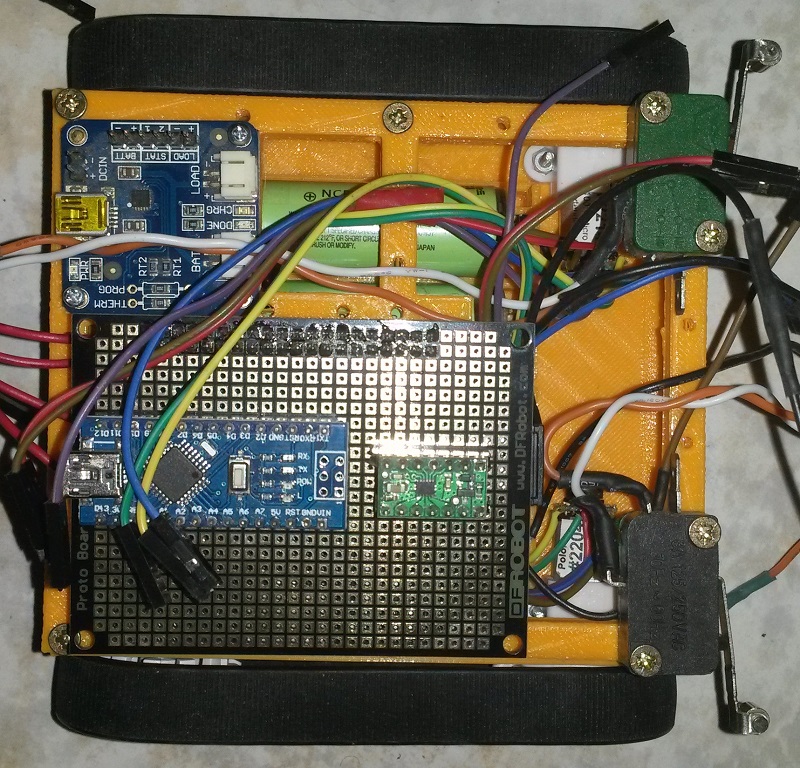
Un nouveau robot basé sur le Raspberry Pi : R.Hasika
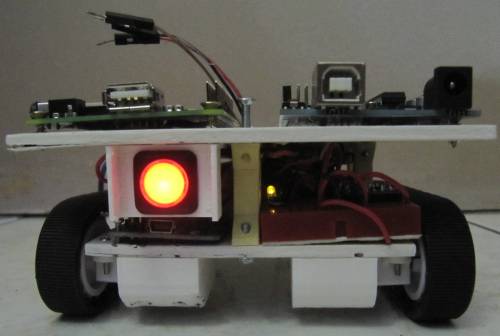
J’ai commencé la construction d’un nouveau robot basé sur le Raspberry pi, R.Hasika.
Celui ci reprend les bases du précédent, R.Cerda, mais en améliorant l’ensemble avec une conception plus précise. L’objectif de ce robot est de pouvoir obtenir un déplacement rectiligne et précis, et des rotations exactes. Ainsi, il devrait être possible de mesurer le déplacement du robot, et de calculer sa position en fonction des déplacements effectués par rapport au point de départ.
L’un des objectifs est de pouvoir faire en sorte que R.Hasika soit capable de se déplacer dans un environnement pour accomplir une mission quelconque, puis de revenir à un point précis afin de pouvoir se recharger automatiquement.
La conception de ce robot est ouverte, je fournis donc les plans et fichiers permettant de reproduire exactement le même robot, ainsi que les scripts permettant d’en modifier certains paramètres (largeur, hauteur, etc).
Pour plus d’informations, les fichiers, des explications, les plans, scripts et codes sources, rendez vous sur la page centrale du projet R.Hasika (http://nagashur.com/wiki/doku.php?id=robotique:r_hasika:start).
Pour voir l’avancement du projet, rendez vous sur la page d’avancement de R.Hasika (http://nagashur.com/wiki/doku.php?id=robotique:r_hasika:avancement).