Outils pour utilisateurs
Panneau latéral
robotique:r_cerda:assemblage
Table des matières
Montage pratique du robot : construction d'un châssis, fixation des roues, etc.
Cet article décrit une partie de la construction de R.Cerda, un robot simple basé sur le Raspberry pi. Il fait suite à un précédent article sur le schéma de principe du robot : Schéma de principe et montage électronique du robot.. Le plan général du tutoriel de construction est le suivant :
- Assemblage des éléments du robot et construction du châssis (page courante)
Nous allons maintenant détailler les étapes de l'assemblage du robot, en partant sur un exemple de configuration utilisant deux roues et une roulette omnidirectionnelle.
Matériel et matériaux nécessaires
Avant tout résumons le matériel :
- Un Raspberry Pi;
- Une grande breadboard ;
- Deux L293D;
- Un MCP23017;
- Un MCP3008;
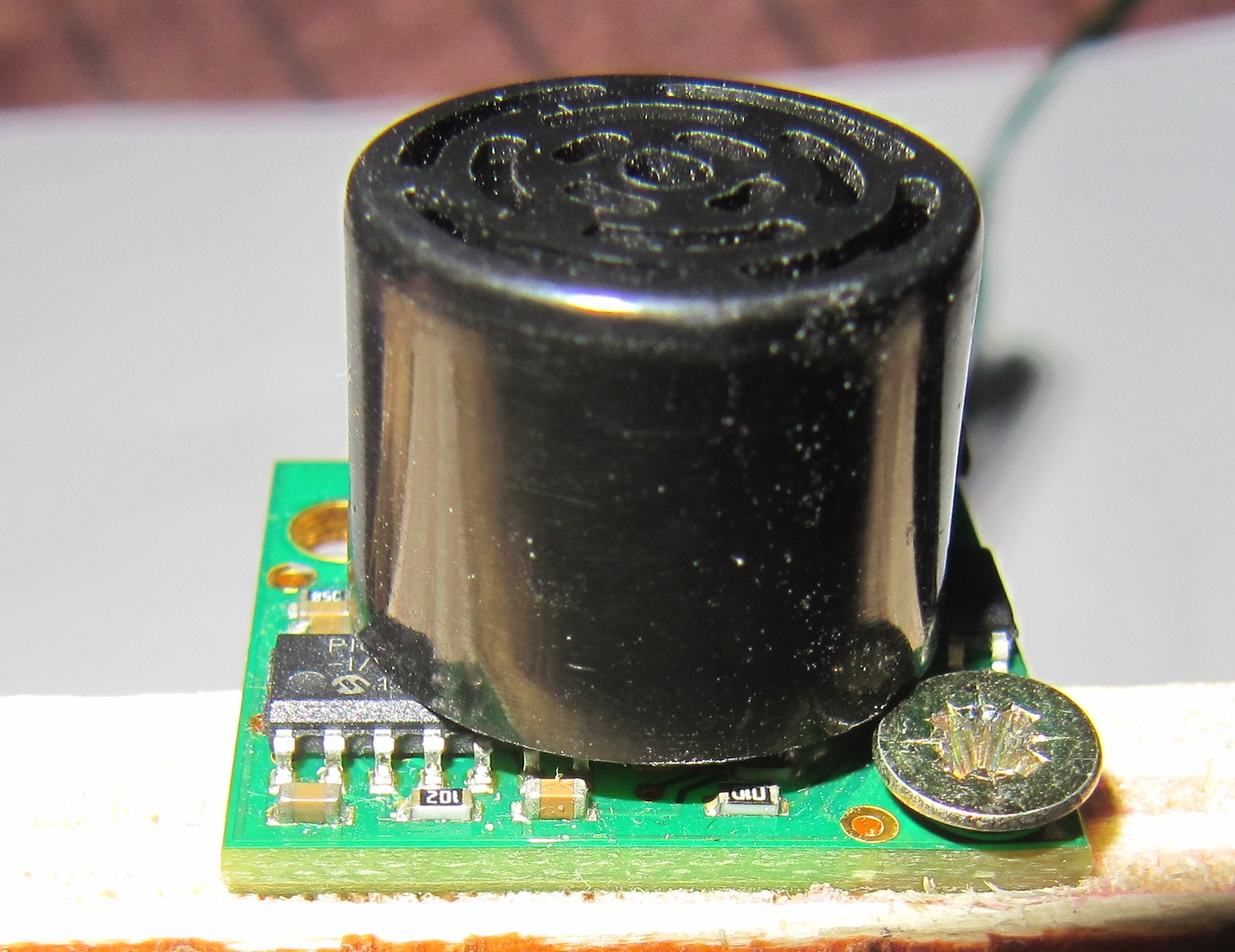
- Un Maxbotix LV-EZ0, 1, 2, 3, ou 4 , ou bien un capteur infrarouge, ou tout autre capteur de distance (facultatif, si vous utilisez uniquement les capteurs de contact);
- Du fil électrique (pour électronique, pas du gros câble);
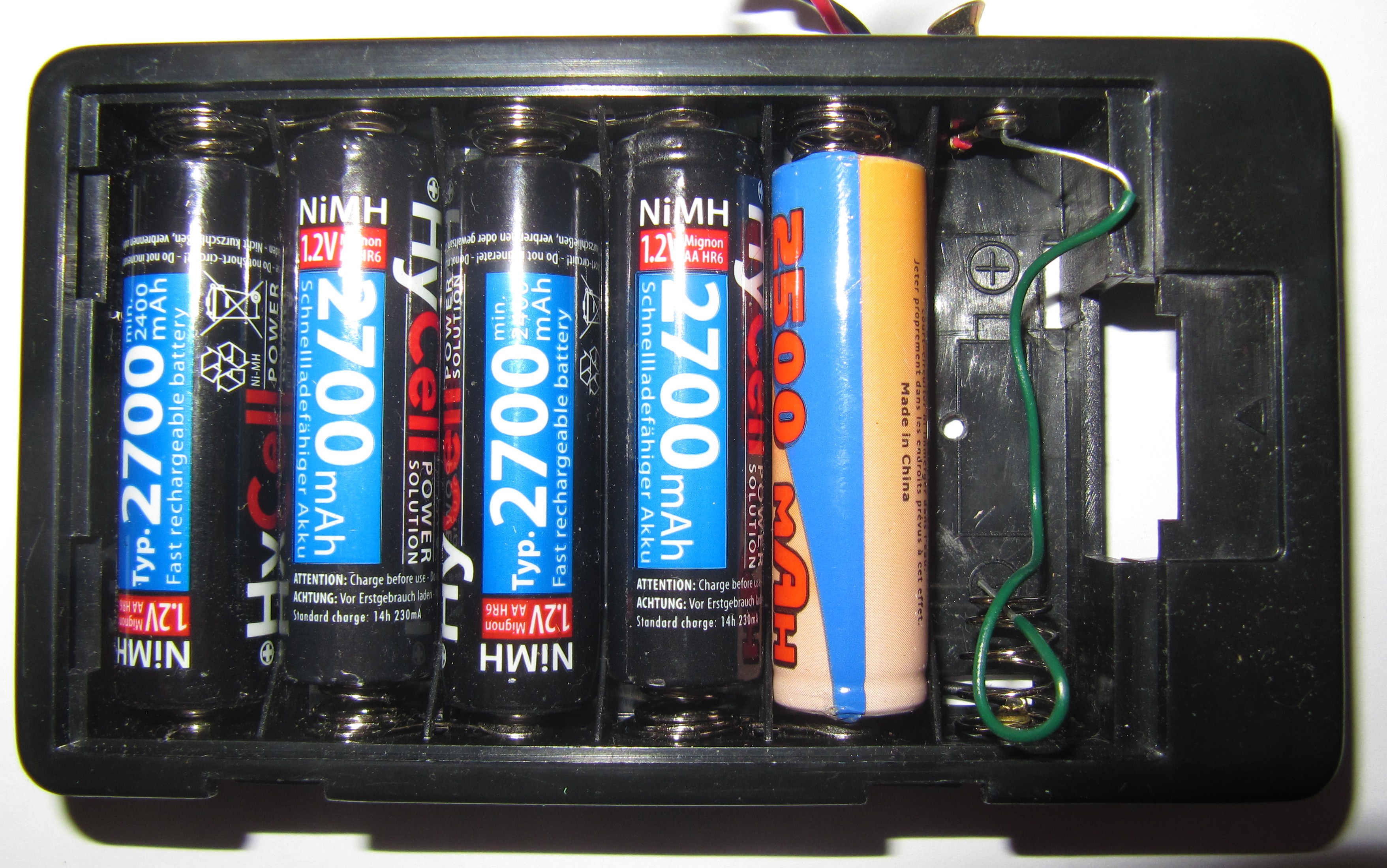
- Une trappe pour 6 batteries AA;
- Deux roues;
- Une roulette;
- Une carte SD;
- Du jumper wire;
- un convertisseur DC-DC fournissant du 5V
- Une planche de bois d'environ 20cm*15-20cm;
- Une petite planchette pour visser la roulette (récupérez une chute, par ex un bout de 5*5cm);
- Des vis à bois de 3mm de diametre, et de 12-20mm de long;
- Deux petites plaques de plexi, plastique, ou n'importe quel matériau que vous pourrez coller sur les moteurs;
- un câble micro-USB;
- Un adaptateur “power jack-USB” (on peut s'en passer si on couple le câble USB pour accéder directement aux fils +5v et à la masse);
- Un jack d'alimentation (on peut également s'en passer dans le même contexte);
- Deux switches pour les capteurs de contact (facultatif, si vous n'utilisez que le détecteur à distance).
Pour les outils, il nous faudra :
- Un tournevis;
- Des ciseaux ou une pince à dénuder/pince coupante;
- Potentiellement un fer à souder et de l’étain, mais on peut faire sans en torsadant les fils entre eux;
- De la colle adaptée pour coller les moteurs à leurs supports (j'ai utilisé de la super glu, pour coller le corps en plastique du moteur au plexiglass).
- Éventuellement une perceuse si vous prenez des plaquettes de plexiglass, en bois on peut visser sans percer.
Nous avons maintenant tout ce dont nous pouvons avoir besoin, on peut commencer le montage.
Installation des roues et de la roulette omnidirectionnelle
La première étape sera de coller les petites plaques sur le corps des moteurs, comme sur ces photos :
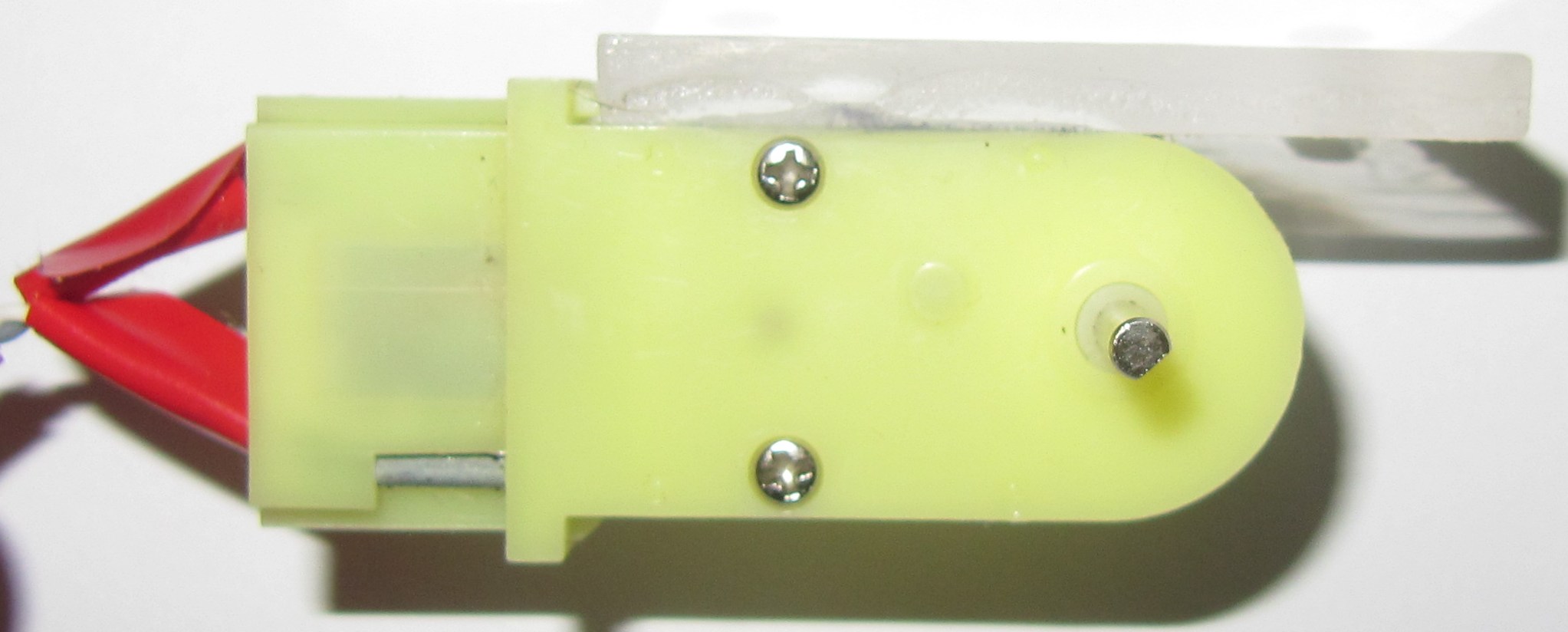

Vous pouvez voir que dans mon cas, j'ai utilisé du plexiglas, et il y a deux trous qui permettront de fixer le moteur sur le châssis.
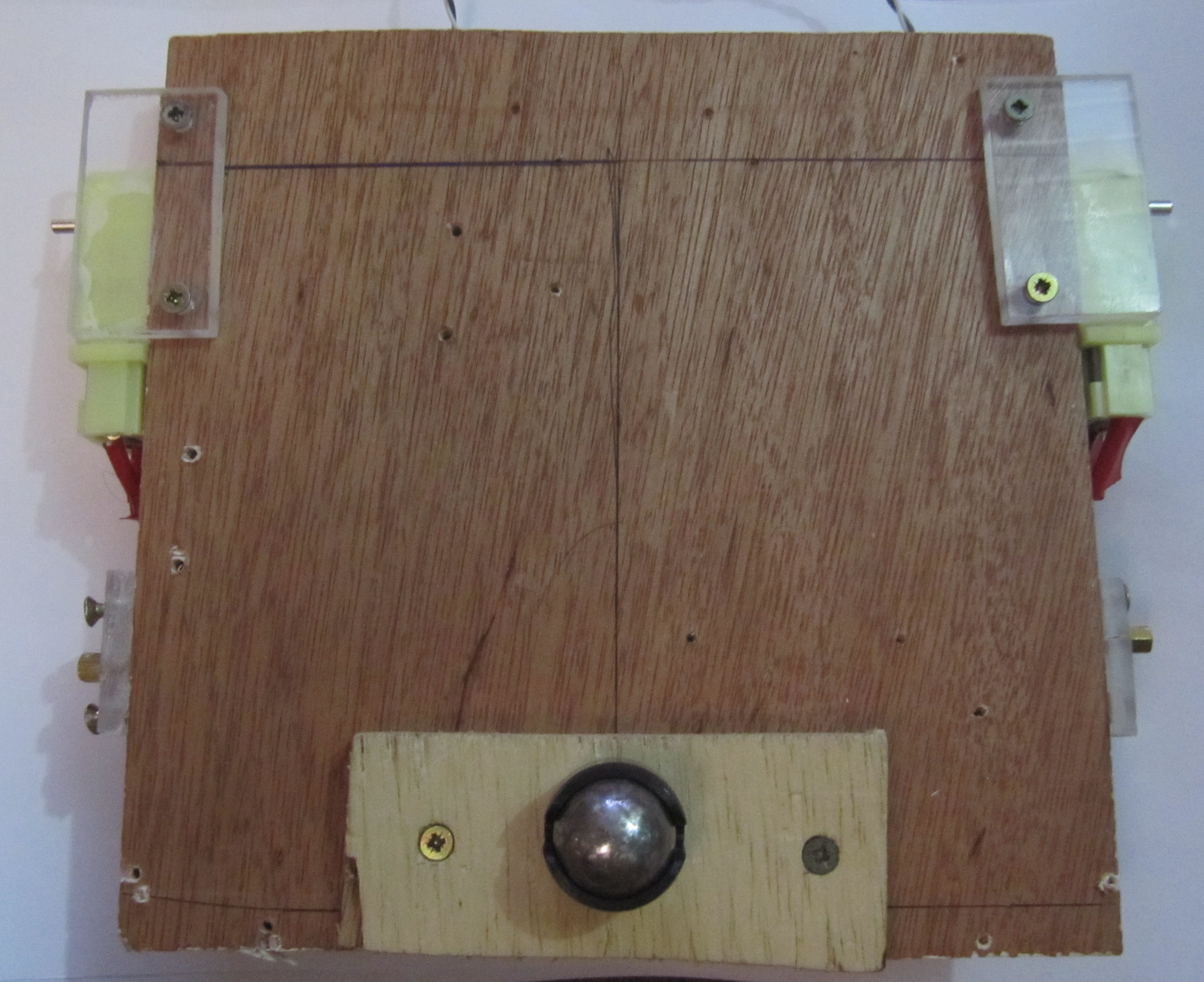
Pour le châssis, j'ai simplement pris une planche de bois. On peut voir sur l'image ci dessous que j'ai tracé un trait permettant de
placer les deux moteurs au même niveau, et également un trait perpendiculaire au milieu pour centrer la roulette.

On peut alors visser les moteurs sur le châssis :

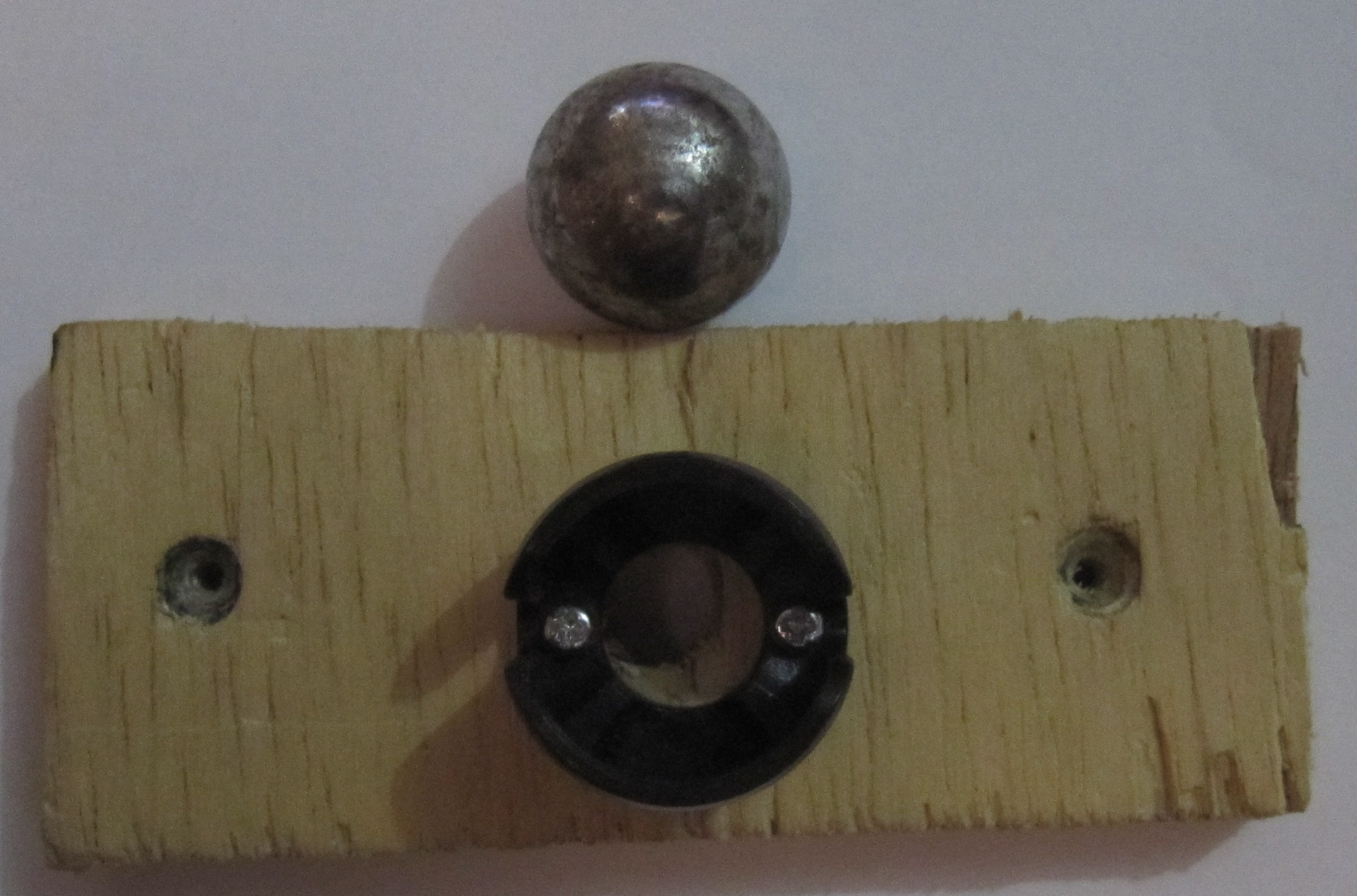
Pour la roulette, nous allons d'abord visser le support de la roulette sur une planchette, avant de mettre la bille de la roulette en place et de visser la planchette sur le châssis:


L'installation des roues sur les moteurs est très simple, car l'axe des moteurs à un profil en D, et il y a un trou de la forme correspondante au centre de la roue.
Il suffit donc d'enficher la roue sur l'axe. On peut donc facilement installer et changer les roues facilement:


Les moteurs sont soudé à des fils, avec au bout des connecteurs femelles de jumper wire. J'ai simplement pris deux câbles femelle-femelle, et je les ai coupés en 2. Il suffit de dénuder le bout coupé, et de le fixer sur le moteur, idéalement, en le soudant.
Partie électronique
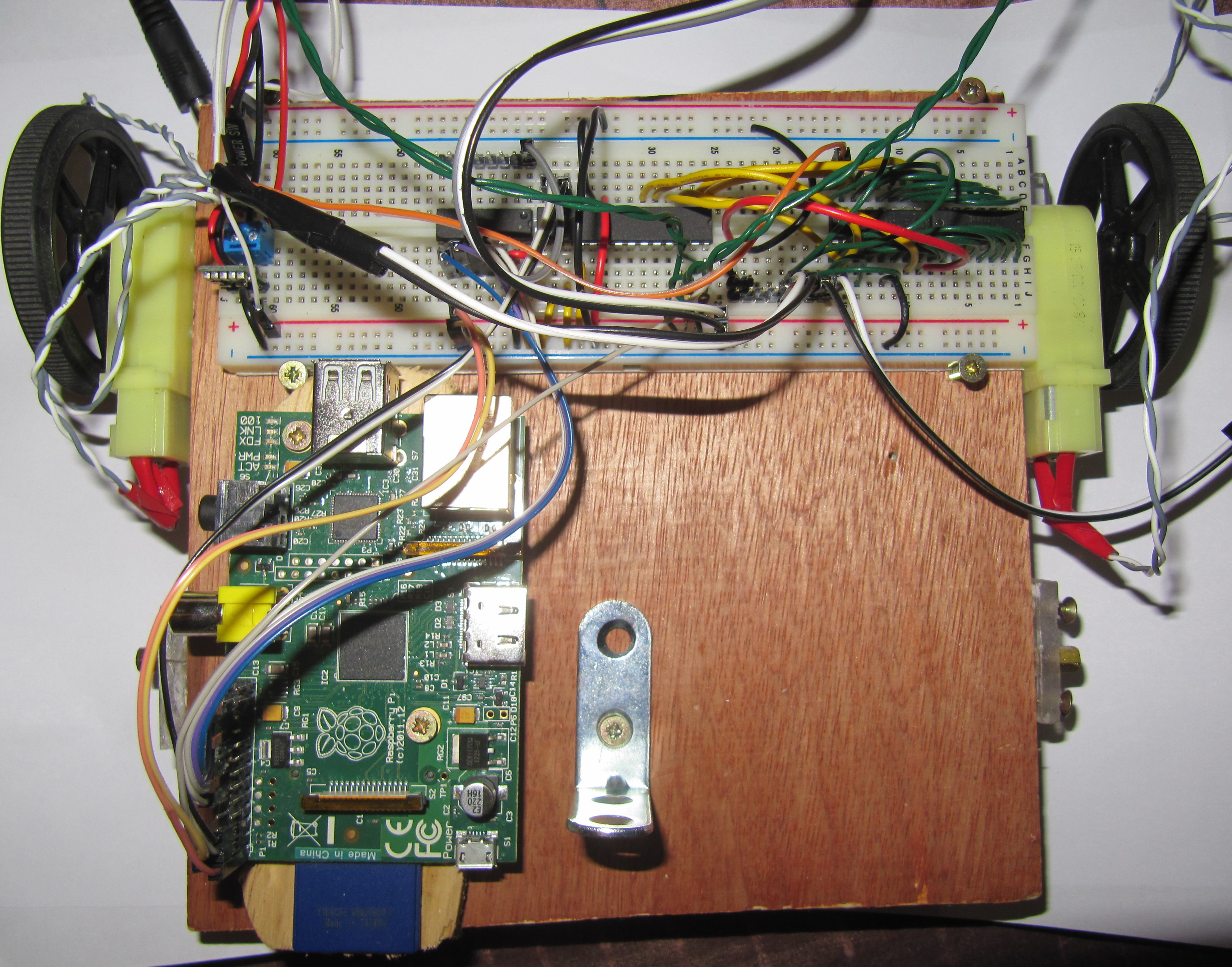
Passons maintenant à l'installation des divers éléments électroniques sur l'autre face du châssis.
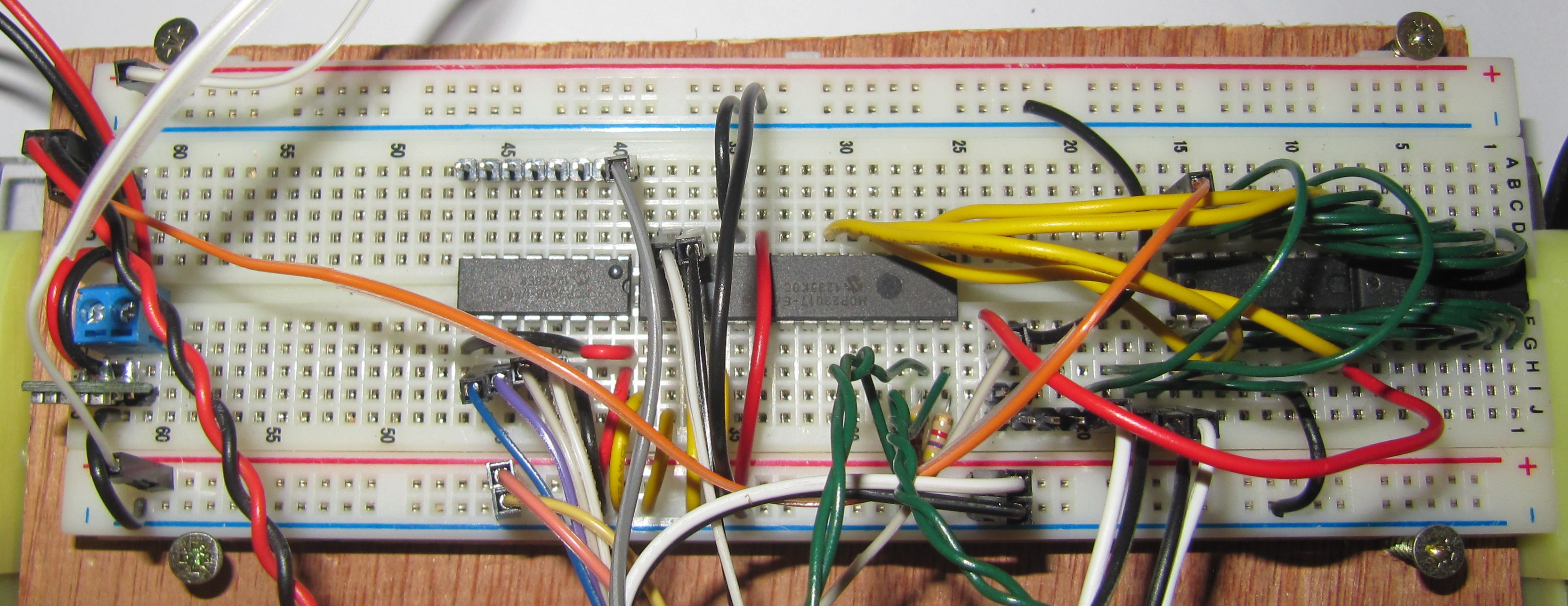
La breadboard principale contient le régulateur de tension, avec les fils partant vers les batteries, et le jack de sortie, le MCP23017, le MCP3008, et les deux L293D. Des câbles partent également vers les moteurs, les capteurs, et le Raspberry Pi.
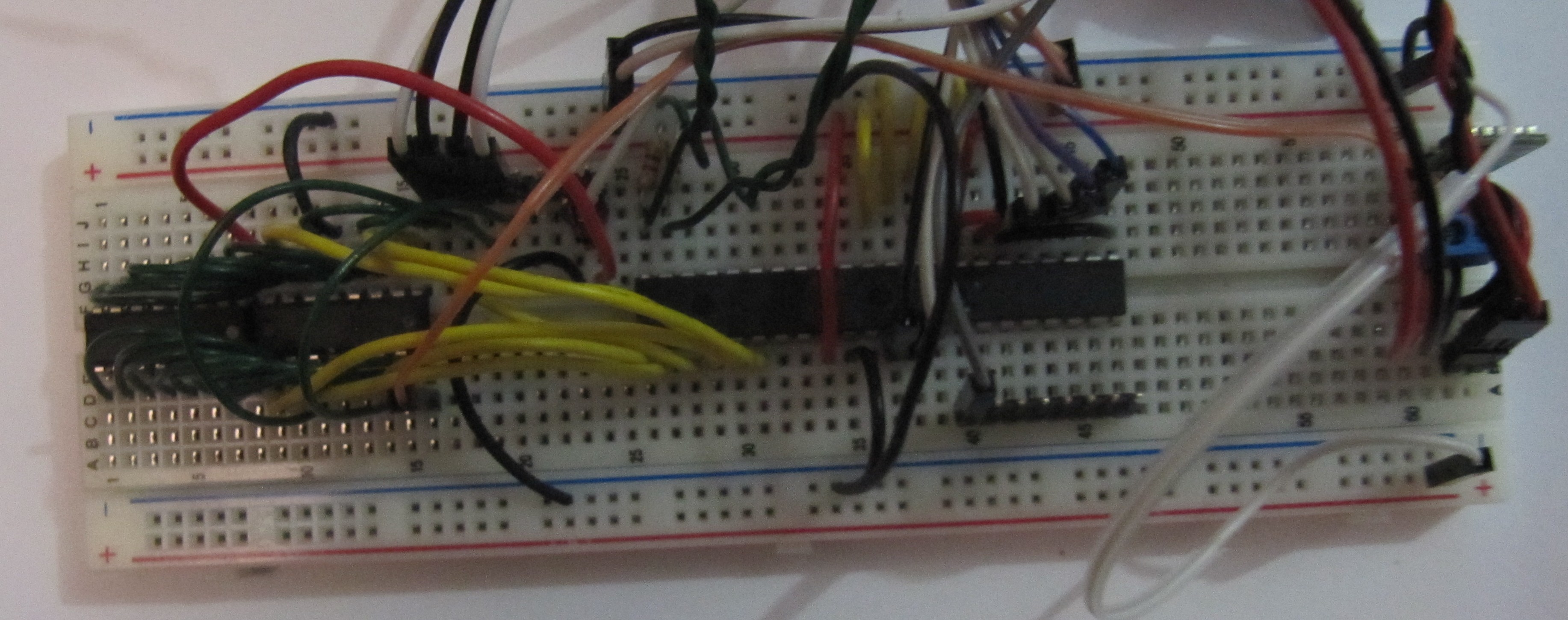
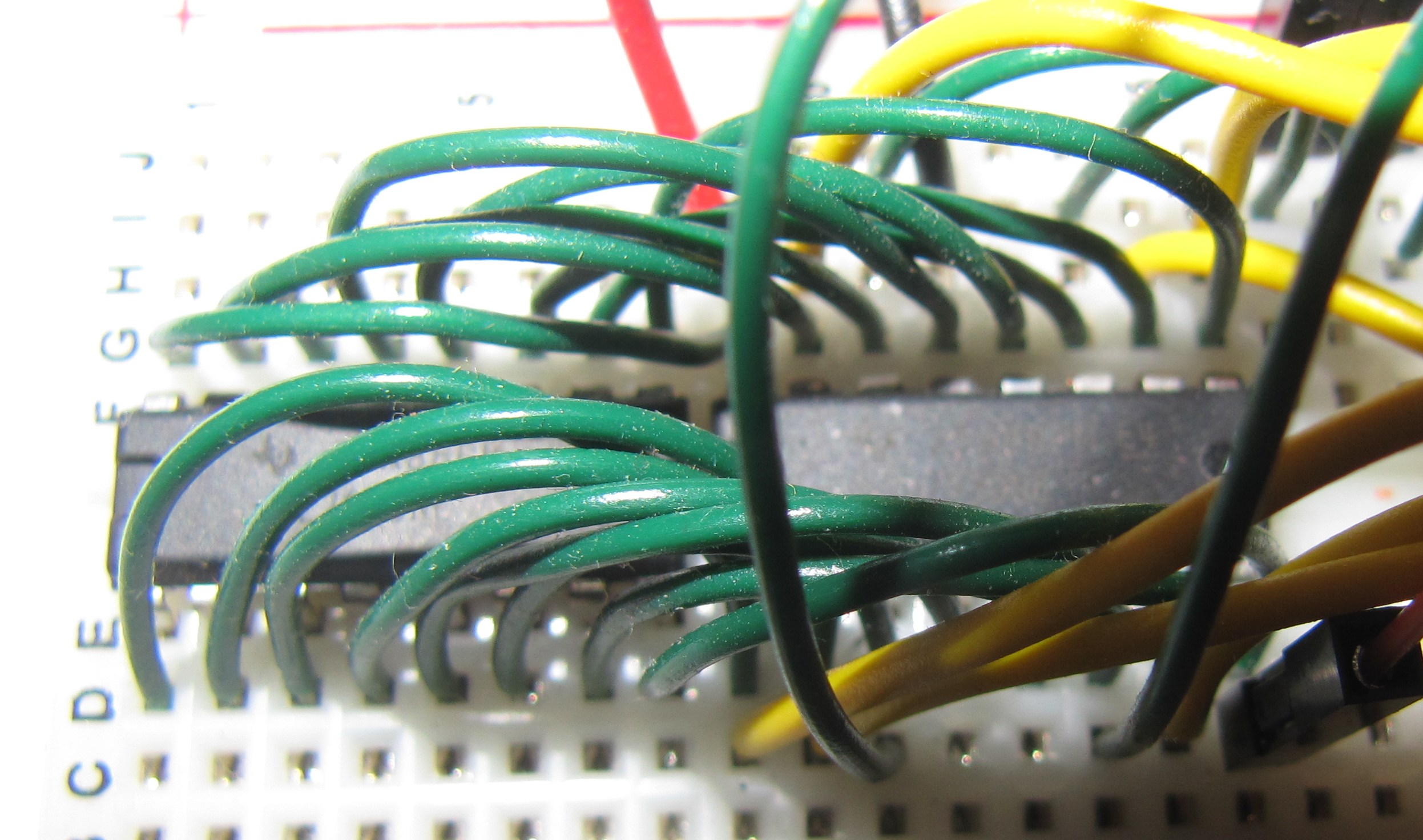
Sur la première image, on voit l'ensemble de la breadboard, et sur la seconde, on peut voir la méthode utilisée pour mettre en parallèle les deux L293D : des fils rigides connectent les pattes d'une puce à celle de l'autre. J'ai utilisé une bobine de fil de fer gaîné pour réaliser ces connections.
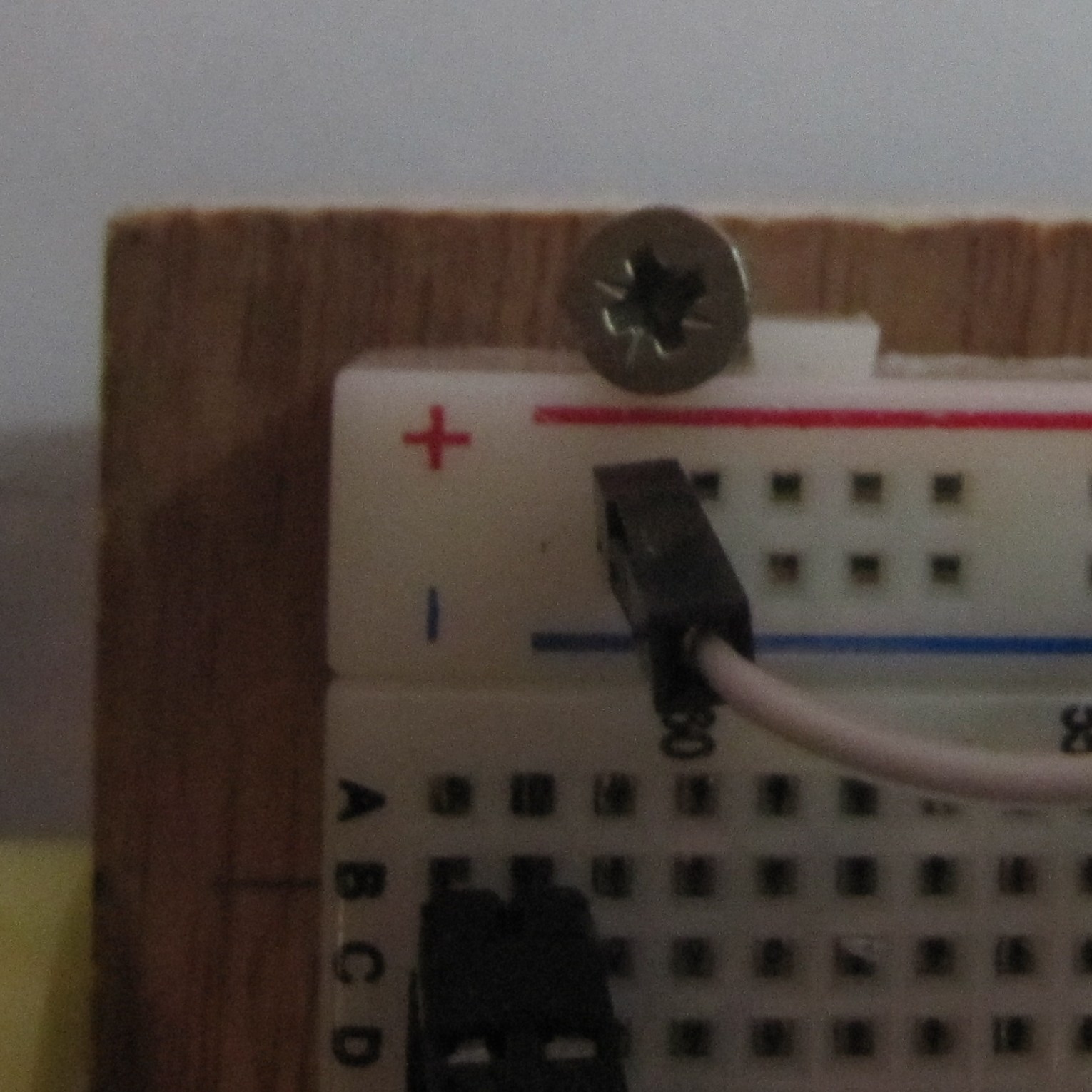
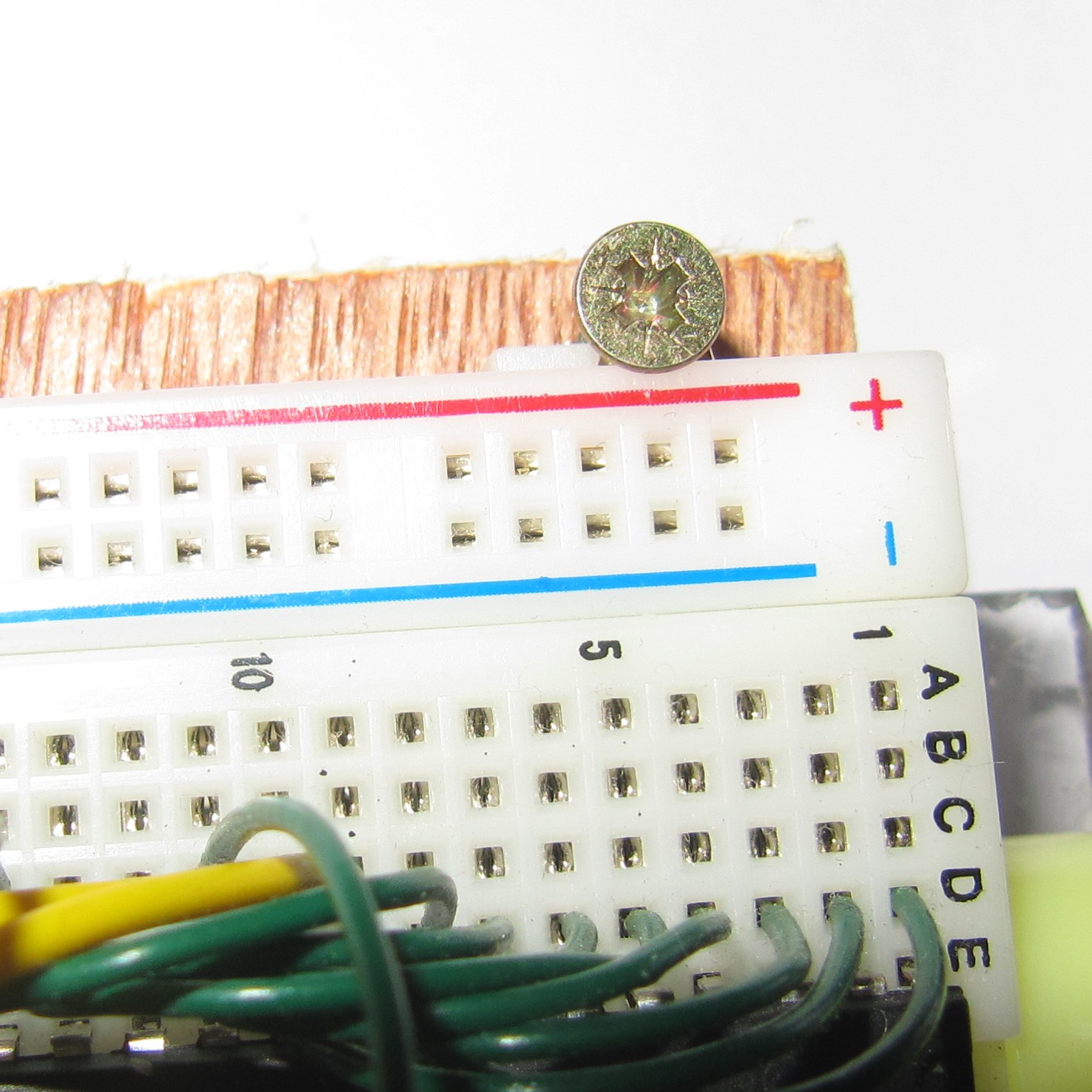
Pour fixer la plaque, j'ai utilisé 4 vis à bois, vissées directement dans le bois du châssis. Elles sont vissées de part et d'autre des ergots sur le haut de la breadboard, de façon à la caler horizontalement. Deux vis en bas bloquent la breadboard dans le sens vertical, de sorte que maintenant celle ci ne bouge plus :
On fixe maintenant le Raspberry Pi lui même sur le châssis, en vissant celui ci avec deux vis, en passant par les deux trous prévus à cet effet sur le Raspberry Pi:
On peut maintenant fixer le logement des batteries AA sur le châssis. On notera que sur les 6 emplacements, l'un d'entre eux ne contient pas de batterie, mais un fil à la place, ce qui permet d'obtenir du 6V au lieu d'avoir du 7.2V. Le logement est vissé au châssis par deux vis, par les trous prévus à cet effet :

Il nous faudra également un câble jack vers USB et un câble micro-USB:

Cependant, il est également possible de couper le câble USB, et d'accéder directement aux fils +5V et masse. Dans ce cas, l'adaptateur USB-PowerJack et le power jack mâle sont superflus.
Les capteurs
Passons maintenant à l'installation des capteurs.
Le capteur à ultrasons est simplement vissé sur la face avant du châssis, et les capteurs de contact sont vissés sous le châssis. Les boutons poussoirs qui servent de détecteurs de contact possèdent des trous par lesquelles peuvent passer les vis servant à les fixer :


Vision d'ensemble du robot monté
On peut voir sur les images ci dessous la disposition des éléments lorsque l'ensemble est en place:
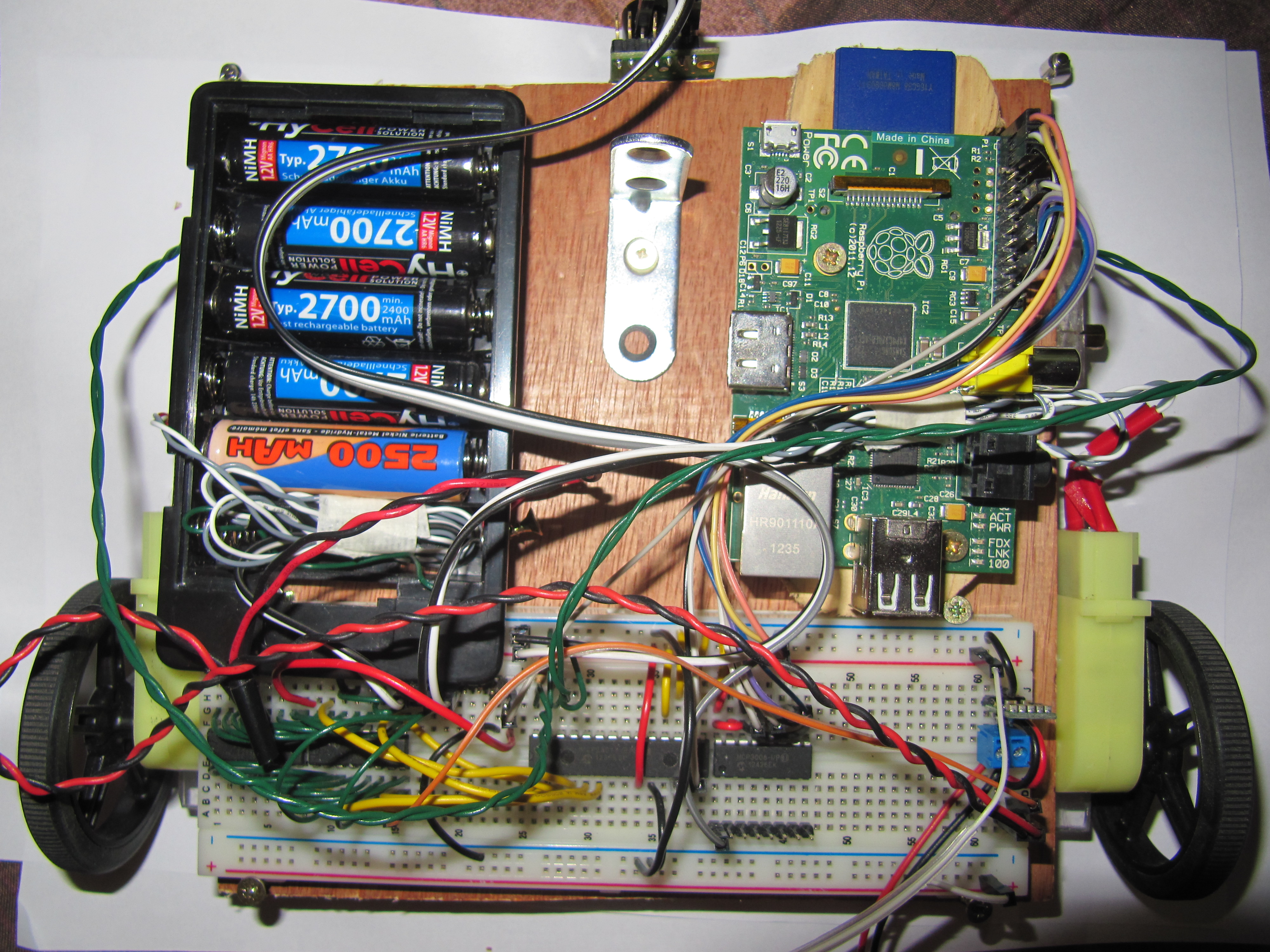
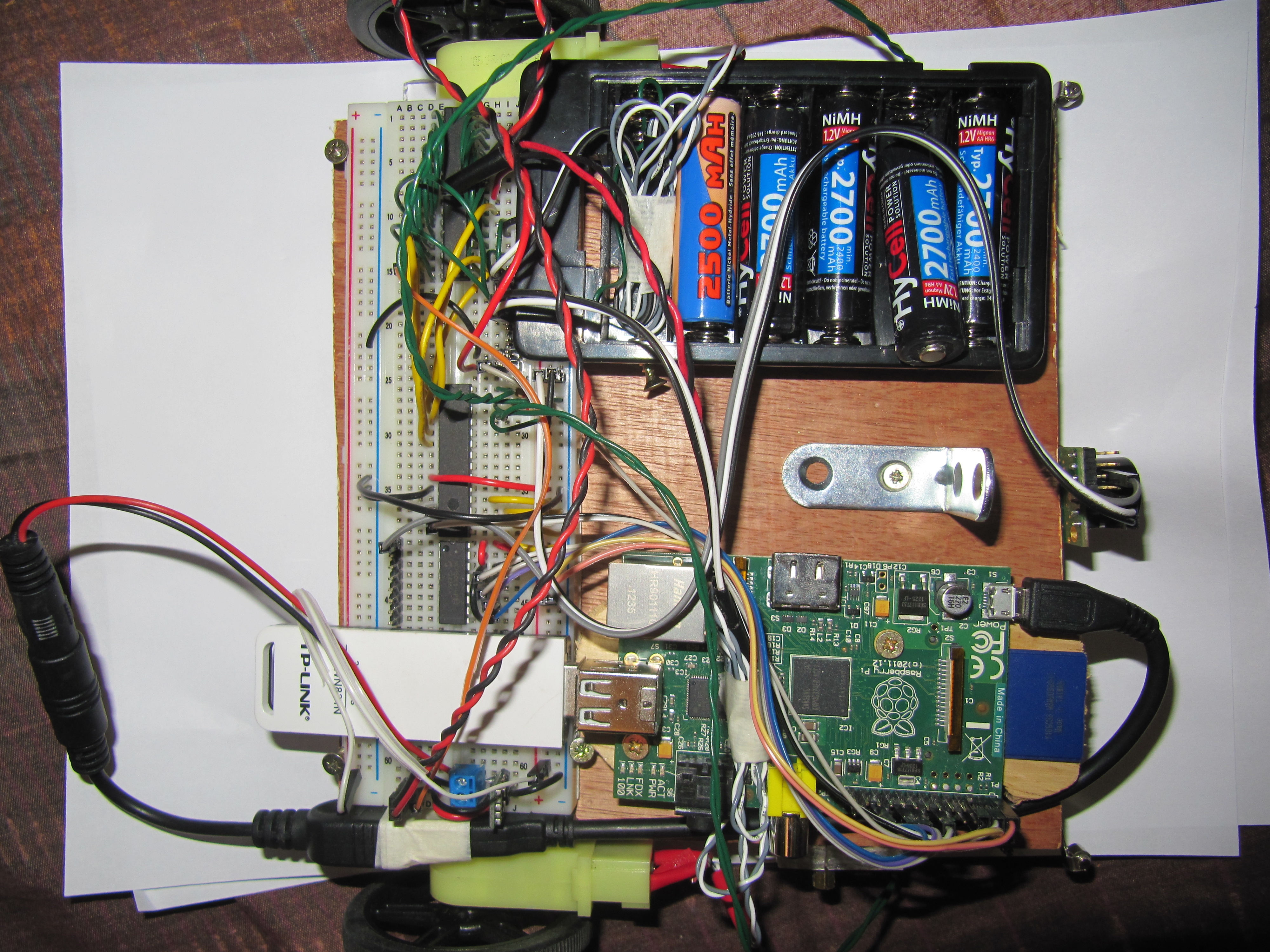
On note sur la photo de droite que les diodes d'état, et la diode de la clé wifi sont visibles depuis le dessus du robot.
Option Webcam
On peut également ajouter une webcam, sur l'un des ports USB. Pour cela j'utilise une petite équerre en acier, vissée sur le châssis, sur laquelle la webcam s'accroche :


Depuis la réalisation de ce tutoriel, la fondation Raspberry Pi a sorti le module camera officiel, utilisant le port CSI. Pour le prix d'une webcam ordinaire, on peut donc ajouter un module capable de prendre des photos en 5 Mpixels, et des videos en fullHD (1920*1080) à 30 images par seconde, disponible en version standard ou infrarouge. De ce fait, l'utilisation d'une webcam n'a d'intérêt que si l'on a déjà une à utiliser, car le module camera est plus performant, plus compact, léger, et peut mieux être exploité par le raspberry pi (qui est capable d'enregistrer de la video full HD sans soucis depuis le module camera, plus difficilement depuis une source USB)
La suite à la prochaine partie : Programmation du robot pour la navigation avec évitement d'obstacles.
robotique/r_cerda/assemblage.txt · Dernière modification: 21/02/2015 16:11 par sky99
Outils de la page
Sauf mention contraire, le contenu de ce wiki est placé sous les termes de la licence suivante : CC Attribution-Share Alike 4.0 International
