J’ai conçu et construit un serveur NAS (stockage de fichiers) en bois, avec un CPU AMD classique dedans et 4 disques de 4To. Il tourne sous Open Media Vault 5 (OMV), avec tous mes dockers (Tous deux des logiciels libres et gratuits!). En plus, j’ai 4 disques externes de 4To, en backup des disques du NAS. Jusqu’ici, je branche chaque disque, avant de lancer un Rsync pour synchroniser vers le disque de backup.
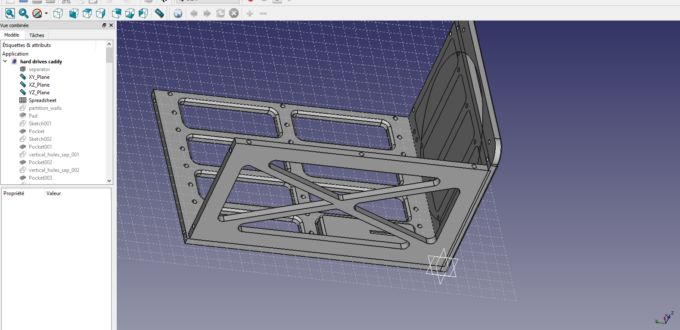
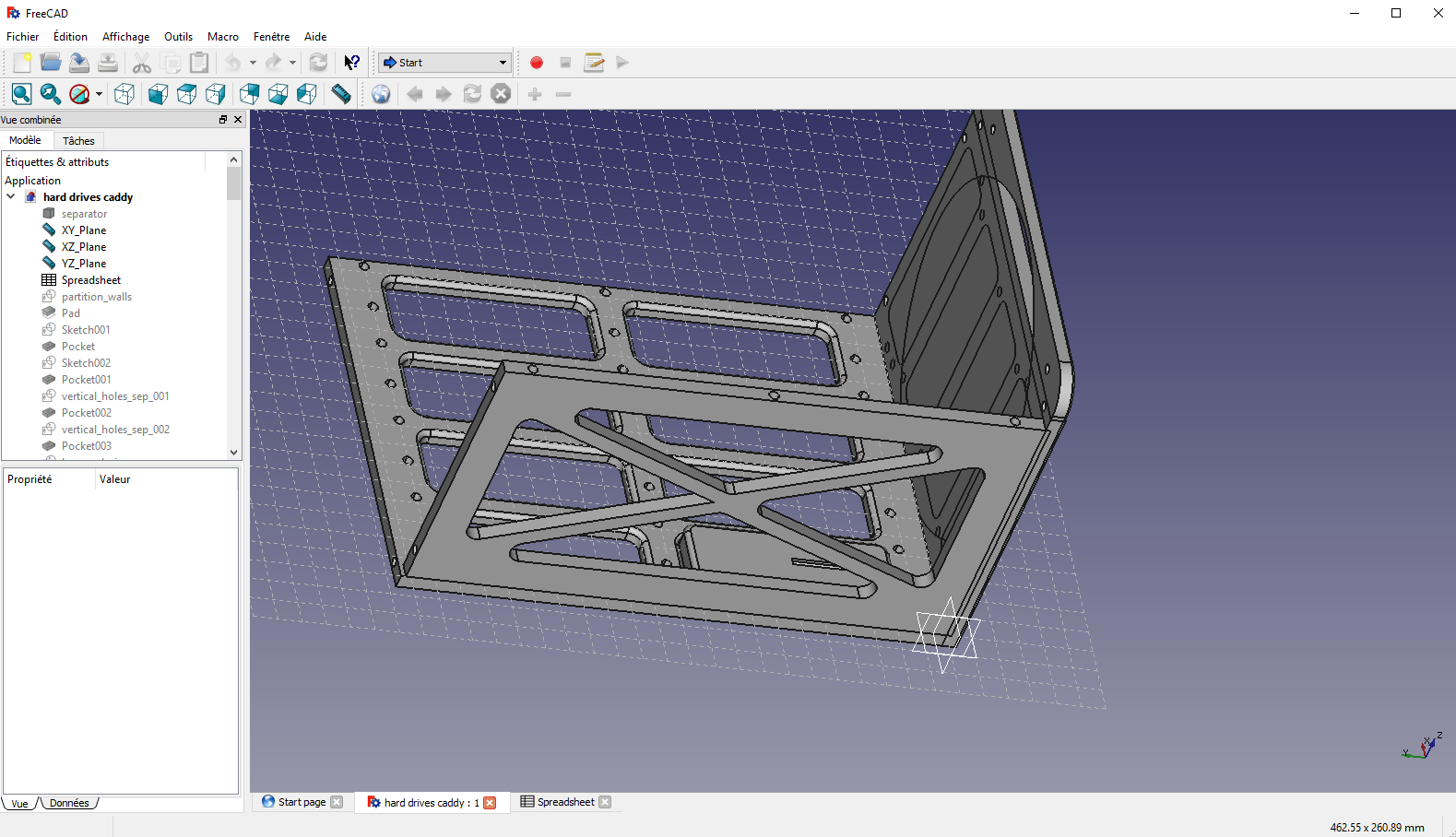
Mais plutôt que d’avoir des disques “en vrac”, j’ai décidé de concevoir avec FreeCAD (Aussi libre et gratuit!) un ensemble de pièces qu’on peut fabriquer à l’imprimante 3D, et qui une fois assemblées permettront de construire facilement un second NAS. Nous verrons ici la conception des pièces dans FreeCAD, ce qui peut vous donner une idée de ce que permet ce logiciel.


 de la station Lacrosse WS 2355")


{kind=link}
{kind=link}